ЗА МЕТОДОМ СКІНЧЕННИХ ЕЛЕМЕНТІВ
4.3.3 Фізичні рівняння. Компонування матриці піддатливості та жорсткості для стержня
Розглянемо стержень i–j, навантажений згідно з рис. 4.1.3 силами N, Mi, Mj. Деформацію стержня характеризує три компоненти: кути повертання в точках i, j – φi, φj та лінійне переміщення Δl.Фізичне рівняння, що встановлює зв’язок між зусиллями та деформаціями для одного стержня
| {ε}e = [d] e ∙ {S}e , | (4.3.4) |
де {ε}e ={φi, φj, Δl}T– вектор деформацій стержня;
{S}e= {Mi, Mj, N}T– вектор кінцевих зусиль в стержні;
[d] e – матриця співвідношень закону Гука для стержня le.
Розгорнутий матричний запис для одного стержня е (рис. 4.1.3).
 . . |
(4.3.5) |

Лінійна компонента деформацій, лінійне подовження Δle за умови пружної роботи стержня:
| Δle=N |
(4.3.6) |
На стержень le крім поздовжньої сили N діють ще згинальні моменти (Mi, Mj). В такому випадку дії декількох сил кутові деформації стержня φі , φj можна знайти на основі принципу суперпозицій через одиничні переміщення
| φi=δiiMi+δijMj | (4.3.7) |
| φj=δjjMi+δijMj | (4.3.8) |
Одиничні переміщення δіj знаходяться за відомими формулами Максвела–Мора.
 |
(4.3.9) |
 |
(4.3.10) |
Матриця співвідношень закону Гука для стержня ℓе:
[d]e =  . . |
(4.3.11) |
Для всієї системи (4.1.7):
де |D| – матриця піддатливості, матриця одиничних переміщень, тобто переміщень, що зумовлені одиничними узагальненими силами. Під узагальненим переміщенням розуміють будь-яке переміщення, незалежно від його характеру або причини, що його зумовлює (тобто переміщення в загальному розумінні цього слова). Кожному переміщенню ставиться у відповідність однозначна силова дія, що здійснює роботу на цьому переміщенні – це узагальнена сила.
Матриця піддатливості всієї рами складається із трьох складових матриць піддатливості кожного стержня і має вигляд:
 .
.Матриця, обернена до матриці піддатливості має назву матриця жорсткості:
| (4.3.12) |
За алгоритмом, наведеним вище, для вхідних параметрів Р=80 кН, a=60° , β=45°, h=3,46 м, q=20 кН/м, М=0 отримані такі значення внутрішніх зусиль (рис. 4.1.4):

Приклад 2. Розрахунок рами методом скінченних елементів


![]() 5,381 м.
5,381 м.
1. Будуємо основну систему МСЕ и нумеруємо вузли і стержні рами.
Оскільки в МСЕ враховуються осьові деформації стержнів, то на жорсткі вузли накладаємо три в’язі, що відповідають трьом переміщенням вузла: вертикальному, горизонтальному і кутовому.
Рама має три скінченних елементи (стержні) и чотири вузли. Координати вузлів в загальній системі координат:
1 – х=0; у=3,6; 2 – х=3; у=3,6;
3 – х=3; у=0; 4 – х=7; у=0.
2. Будуємо матриці жорсткості стержнів і вектори вузлових навантажень у місцевій системі координат, коли вісь x' спрямована уздовж осі стержня, а вісь y' - перпендикулярно до осі стержня.
Кожний стержень має по три невідомих переміщення ![]() в кожному вузлі.
в кожному вузлі.

Стержень 1 (рис. 4.7).
Стержень 1 має жорстке защемлення с двох сторін.
Матриця жорсткості СЕ №1 має вигляд:

Навантаження, прикладене до стержня, зосереджуємо в вузлах. Вектор вузлового навантаження в місцевій системі координат має вигляд:
{p'}1=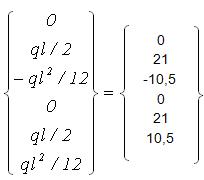
Стержень 2 (рис. 4.8).

Для стержня 2 матриця жорсткості обраховується за тими ж формулами, що і для стержня 1. Вектор вузлових навантажень нульовий, оскільки до стержня не прикладене навантаження.
[K']2 = 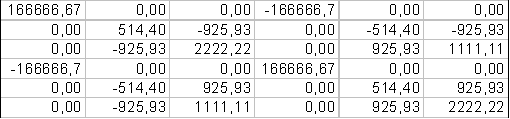
Стержень 3 (рис. 4.9).

[K']3 = 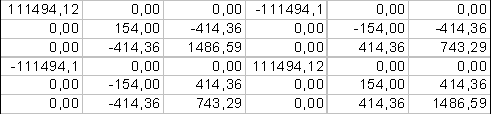
3. Будуємо матриці перетворень для кожного стержня.
де β - кут між напрямом осі х загальної системи координат і напрямом осі x' місцевої системи координат.
Для стержня 1 матрицю перетворень записувати не потрібно, оскільки в цьому випадку місцева система координат збігається з загальною системою координат.
Стержень 2.

Стержень 3.

4. Будуємо матриці жорсткості в загальній системі координат:
Перемноження матриць виконуємо на комп’ютері за допомогою програми EXCEL.
[K]1=[K']1=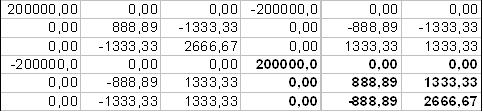
[K]2=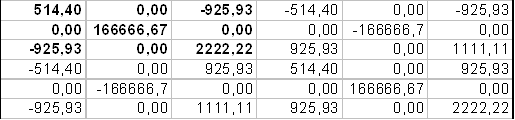
[K]3=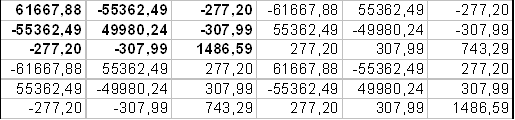
5. Перетворимо вектори вузлових навантажень із місцевої системи координат в загальну.
 ; {p}2=
; {p}2= ;{p}3=.
;{p}3=.6. Будуємо матрицю жорсткості для всієї рами в загальній системі координат.
Матриці жорсткості для трьох елементів рами можна подати в вигляді:

Оскільки невідомими є переміщення вузла 2, то загальну матрицю жорсткості отримуємо, додаючи елементи матриць [k22]. В матрицях ці елементи виділені жирним шрифтом.
 .
.7. Формуємо вектор вузлових навантажень в загальній системі координат.
Вектори вузлових навантажень для трьох стержнів рами можна подати в вигляді:

Вектор навантаження в вузлі 2 отримаємо, додаючи елементи {p2}.
 .
.8. Записуєм систему рівнянь рівноваги для вузла 2.
Розв’язуючи систему рівнянь, отримуємо вектор переміщень вузла 2.
 .
.
9. Записуємо вектори вузлових переміщень для кожного стержня в загальній системі координат.
 ; {δ}2=
; {δ}2= ; {δ}3=
; {δ}3= .
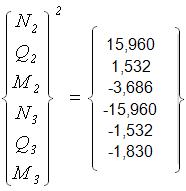
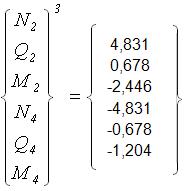
.10. Визначаємо вузлові зусилля в стержнях в місцевій системі координат.
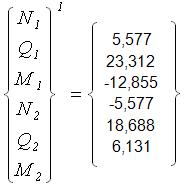 ;
;
 ;
;
 .
.
11. За обрахованими значеннями будуємо епюри M, Q, N (рис. 4.10-4.12).

Величину моменту в середньому перетині стержня 1 обраховуємо за формулою:
Перевіряємо рівновагу вузла рами




