Системи керування електроприводами.
Розрахунок системи підпорядкованого керування електроприводом постійного струму. Курсове та дипломне проектування
6 ДОСЛІДЖЕННЯ ДИНАМІЧНИХ ХАРАКТЕРИСТИК ЗАМКНЕНОЇ СИСТЕМИ ЕЛЕКТРОПРИВОДА ШЛЯХОМ КОМП’ЮТЕРНОГО МОДЕЛЮВАННЯ
|
|
Дослідження системи електропривода можна реалізувати, наприклад, в середовищі Simulink (Matlab) [38, 39]. Для цього потрібно структурну схему (structural circuit) рис. 6.1 реалізувати з використанням відповідних блоків середовища Simulink (Matlab).
Рисунок 6.1 – Схема системи ТП-Д
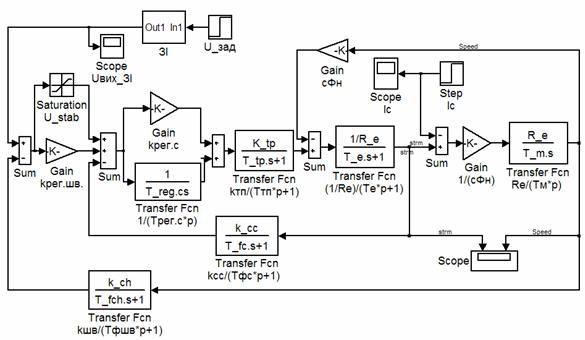
Система електропривода з П-регулятором швидкості в середовищі Simulink (Matlab) може бути подана за допомогою стандартних блоків, як показано на рис. 6.2.
Рисунок 6.2 – Схема електропривода з П-регулятором швидкості в середовищі Simulink (Matlab)
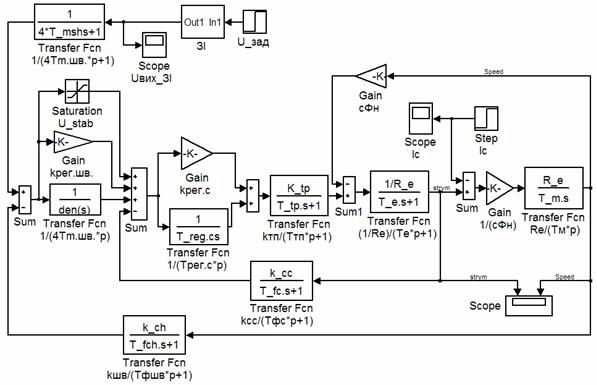
Система електропривода з ПІ-регулятором швидкості в середовищі Simulink (Matlab) показана на рис. 6.3.
Рисунок 6.3 – Схема електропривода з ПІ-регулятором швидкості в середовищі Simulink (Matlab)
На рис. 6.2 та на рис. 6.3 показано, за допомогою яких блоків можна реалізувати той чи інший блок (перший рядок назви під блоком).
|
|
|
|
|
|
|
|
|