1.2 Класифікація електронних систем
Вхідними та вихідними сигналами (англ. signal) електронної системи можуть бути аналогові сигнали (англ. аnalog signal), одиничні цифрові сигнали (англ. digital signal), цифрові коди, послідовності цифрових кодів. Відповідно системи можуть бути аналоговими, цифровими або комбінованими, тобто аналого-цифровими.
Якщо система аналого-цифрова, то вхідні аналогові сигнали перетворюються в послідовності кодів вибірок за допомогою аналого-цифрового перетворювача (АЦП), а вихідні аналогові сигнали формуються з послідовності кодів вибірок за допомогою цифро-аналогового перетворювача (ЦАП). Обробка й зберігання інформації виконуються в цифровому вигляді.
За своєю будовою електронні системи поділяють на системи на “жорсткій логіці” та мікропроцесорні системи.
Характерною особливістю традиційної цифрової системи на відміну від мікропроцесорної є те, що алгоритми обробки й зберігання інформації в ній жорстко зв'язані зі схемотехнікою системи. Тобто, зміна цих алгоритмів можлива тільки шляхом зміни структури системи, заміни електронних вузлів, що входять у систему, і/або зв'язків між ними. Саме тому традиційна цифрова система часто називається системою на "жорсткій логіці".
Будь-яка система на "жорсткій логіці" обов'язково є спеціалізованою системою, налаштованою винятково на одну задачу або (рідше) на декілька близьких, заздалегідь відомих задач. Це має свої безперечні переваги.
По-перше, спеціалізована система (на відміну від універсальної) ніколи не має апаратурної надмірності, тобто кожен її елемент обов'язково працює на повну потужність (звичайно, якщо ця система грамотно спроектована).
По-друге, саме спеціалізована система може забезпечити максимально високу швидкодію, тому що швидкість виконання алгоритмів обробки інформації визначається в ній тільки швидкодією окремих логічних елементів й обраною схемою шляхів проходження інформації. А саме, логічні елементи завжди мають максимальну на даний момент швидкодією.
Але в той же час великим недоліком цифрової системи на "жорсткій логіці" є те, що для кожної нової задачі її необхідно проектувати й виготовляти заново. Це процес тривалий, дорогий та потребує високої кваліфікації виконавців. Шлях подолання цього недоліку досить очевидний: необхідно побудувати таку систему, що могла б легко адаптуватися під будь-яку задачу, перебудовуватися з одного алгоритму роботи на інший без зміни апаратури. І задавати той або інший алгоритм шляхом уведення в систему додаткової керуючої інформації, програми роботи системи (рис. 1.2). Тоді система стане універсальною або програмованою, не жорсткою, а гнучкою. Саме це й забезпечує мікропроцесорна система.
Мікропроцесор (англ. microprocessor) – програмно-керований пристрій, призначений для обробки цифрової інформації й керування процесом цієї обробки, виконаний у вигляді однієї (або декількох) інтегральної схеми з високим ступенем інтеграції електронних елементів.
Зменшення вартості, споживаної потужності й габаритних розмірів, підвищення надійності й продуктивності мікропроцесорів сприяли значному розширенню сфери їхнього використання. Поряд із традиційними обчислювальними системами вони все частіше стали використовуватися в задачах керування та обробки. При цьому перед мікропроцесором ставилася задача програмного управління різними периферійними об'єктами в реальному масштабі часу.
Спрощена структурна схема мікропроцесорної системи управління має вигляд (рис.1.2).
Рисунок 1.2 – Структурна схема мікропроцесорної системи
На процесор покладається задача виконання всіх програмних дій, необхідних відповідно до алгоритму роботи пристрою. У блоці пам'яті зберігаються команди програми функціонування процесора, а також значення констант і змінних величин, що беруть участь в обчисленнях. Блок введення-виведення виконує функцію з’єднання мікропроцесорної системи з об'єктом керування.
Широке використання мікропроцесорної техніки саме для завдань керування привело до появи на ринку спеціалізованих мікропроцесорних пристроїв, орієнтованих на подібного роду застосування. Особливістю цих мікросхем є те, що крім власне процесора, на цьому ж кристалі розташована й система введення-виведення, що дозволяє знизити функціональну складність і габаритні розміри мікропроцесорної системи керування. Подібні пристрої називаються мікроконтролерами.
Мікроконтролер (англ. microcontroller) – обчислювально-керуючий пристрій, призначений для виконання функцій логічного контролю й керування периферійним устаткуванням, виконаний у вигляді однієї ВІС, що сполучає в собі мікропроцесорне ядро і набір вбудованих пристроїв введення-виведення.
У сучасній перетворювальній техніці мікроконтролери виконують не тільки роль безпосереднього керування напівпровідниковим перетворювачем за рахунок вбудованих спеціалізованих периферійних пристроїв, але й роль цифрового регулятора, системи захисту й діагностики, а також системи зв'язку з технологічною мережею вищого рівня.
Останнім часом з'явився ряд мікроконтролерів, спеціалізованих для завдань керування напівпровідниковими перетворювачами. Їхнє обчислювальне ядро, побудоване, як правило, на базі так званих "процесорів цифрової обробки сигналів", адаптовано на виконання рекурентних поліноміальних алгоритмів цифрового регулювання. Вбудовані периферійні пристрої містять у собі багатоканальні генератори ШІМ-сигналів, аналого-цифрові перетворювачі, блоки векторних перетворень координат, таймери-лічильники тощо. Прикладами таких пристроїв можуть служити мікроконтролери ADMC330 фірми Analog Devіces, TMS320C240 фірми Texas Іnstruments, 56800 фірми Motorola, векторний співпроцесор ADMC200 фірми Analog Devіces.
Але будь-яка універсальність обов'язково призводить до надмірності. Адже вирішення максимально важкої задачі потребує набагато більше засобів, ніж розв’язання максимально простої задачі. Тому складність універсальної системи повинна бути такою, щоб забезпечити розв’язання найважчої задачі, а при розв’язанні простої задачі система буде працювати далеко не на повну силу, буде використовувати не всі свої ресурси. І чим простіша розв'язувана задача, тим більша надмірність і тем менш виправданою стає універсальність. Надмірність веде до збільшення вартості системи, зниження її надійності, збільшення споживаної потужності й т. д.
Крім того, універсальність, як правило, призводить до істотного зниження швидкодії. Оптимізувати універсальну систему необхідно так, щоб кожна нова задача розв’язувалася максимально швидко. Загальне правило таке: чим більша універсальність, гнучкість, тим менша швидкодія. Більше того, для універсальних систем не існує таких задач, які б вони розв’язували з максимально можливою швидкодією.
Таким чином можна зробити такий висновок. Системи на "жорсткій логіці" ефективні там, де розв'язувана задача не змінюється тривалий час, де потрібна найвища швидкодія, де алгоритми обробки інформації гранично прості. А універсальні, програмовані системи ефективні там, де часто змінюються розв'язувані задачі, де висока швидкодія не є занадто важливою, де алгоритми обробки інформації досить складні.
Однак за останні десятиліття швидкодія універсальних (мікропроцесорних) систем дуже виросла (на кілька порядків). До того ж великий обсяг випуску мікросхем для цих систем привів до різкого зниження їхньої вартості. У результаті область застосування систем на "жорсткій логіці" різко звузилася. Більш того, високими темпами розвиваються зараз програмовані системи, призначені для розв’язання одної задачі або декількох близьких задач. Вони вдало об’єднують у собі як переваги систем на "жорсткій логіці", так і програмованих систем, забезпечуючи досить високу швидкодію й необхідну гнучкість.
В науково-технічній літературі системи, що використовують у своєму складі ЕОМ в залежності від області їх застосування, а також від класу задач, які розв’язуються ними, називаються комп’ютерними або комп’ютеризованими системами.
Таким чином, комп’ютеризовані системи (англ. computer aided system) – це системи, під якими розуміють сукупність технічних засобів, яка має в своєму складі керуючу ЕОМ, засоби збору, перетворення, передачі, відображення, а також спеціальне математичне та програмне забезпечення, що виконує весь комплекс обробки інформації.
Вважається, що ЕОМ треба вводити до складу автоматичної системи тоді, коли кількість отриманої інформації стає дуже великою, а обробка інформації ускладнюється або стає занадто тривалою у часі й не відповідає вимогам або швидкодії системи. В таких системах передбачені підсистеми мультиплексування інформації, вимірювальні канали та канали зв’язку.
Узагальнена схема комп’ютеризованої системи наведена на рис. 1.3.
Вимірювальний канал (англ. measuring channel) – це засіб вимірювання, який є складовою частиною вимірювальних систем у вигляді сукупності засобів вимірювальних операцій, засобів (каналів або ліній) зв’язку для послідовних перетворень і передачі вимірювальної інформації.
Канал зв’язку (англ. channel of communication) – це сукупність передавача, приймача та лінії зв’язку, призначених для передачі інформації від відправника (джерела) до адресата.
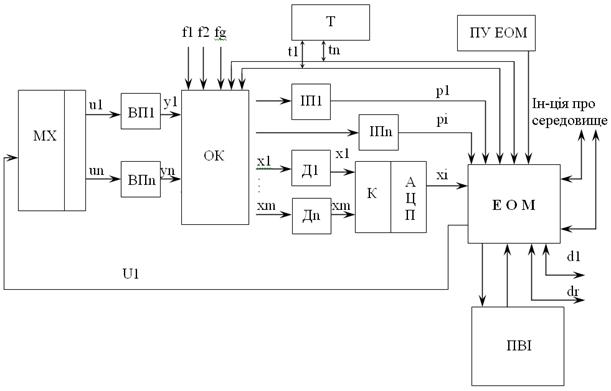
Рисунок 1.3 – Узагальнена схема комп’ютеризованої системи:
МХ – мультиплексор; ОК – об’єкт керування (дослідження);
Д1, Дn – датчики; Хі,Хп – інформація; ВП – виконавчий пристрій;
ІП – індикатори повідомлень; u1, un – сигнал керування; Т – таймер;
ПУ ЕОМ – пульт управління ЕОМ; ПВІ – пристрій
відображення інформації.
Лінія зв'язку (англ. communication line) – це фізичне середовище, по якому передаються сигнали.
Програмований канал зв’язку або інтерфейс (англ. interface) – це узгодженість обміну інформацією та правил обміну інформацією, під якою розуміють електричну, логічну й конструктивну сумісність пристроїв, що беруть участь в обміні.