1.9.1 Метрологічна вірогідність безвідмовної роботи.
Якщо вдається визначити, хоча б орієнтовно, середню частку q метрологічних відмов в загальному потоці відмов ЗВТ, то оцінюють вірогідність роботи ЗВТ без метрологічних відмов Рм(t) за час (напрацювання) t за формулою
![]() , (1.144)
, (1.144)
де Р(t) – вірогідність безвідмовної роботи ЗВТ (технічна) за час напрацювання t.
Якщо середню частку метрологічних відмов q визначити не вдається, то беруть РМ(t) = Р(t).
На підставі матеріалів, наданих на випробування, визначають СКВ s0 розподілу похибки градуювання ЗВТ при випуску з виробництва, межу DН допустимої похибки (нестабільності) ЗВТ, що пронормована в технічних умовах (ТУ), межу DЕ допустимої похибки (нестабільності) ЗВТ в реальних умовах експлуатації (відповідно до вимог державної (міждержавної) повірної схеми).
Встановлюють відповідно до критеріїв значення вірогідності метрологічної справності Рм.с. чи довірчої вірогідності Р.
Як критерії при встановленні МПІ слід вибирати показники метрологічної надійності або стабільності ЗВТ. Вид критерію визначається способом повірки ЗВТ.
При повірці, що полягає у встановленні дійсних значень ЗВТ або його градуюванні, критерієм є межа допустимих значень довірчих меж нестабільності ЗВТ за МПІ при заданій довірчій вірогідності Р.
При повірці, що полягає у визначенні придатності до застосування ЗВТ за критерієм стабільності (із забракуванням екземплярів, зміна дійсних значень або градуювальної характеристики яких за МПІ перевищує встановлену межу допустимої нестабільності) та подальшому встановленні його дійсного значення. В такому випадку показником метрологічної надійності є межа допустимих значень вірогідності метрологічної справності ЗВТ в момент повірки Рм.с..
При повірці, що полягає у визначенні придатності до застосування ЗВТ за критерієм точності (із забракуванням екземплярів, дійсні значення характеристик похибок яких перевищують встановлені межі допустимих значень), показником метрологічної надійності також є вірогідність метрологічної справності Рм.с..
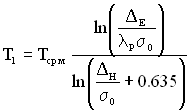
В припущенні про симетричність закону розподілу похибок оцінити міжповірочний інтервал Т1 можна за формулою
 , (1.145)
, (1.145)
де lР – коефіцієнт нормального розподілу, що відповідає ймовірності Р(t) або РМ(t);
![]() – коефіцієнт нормального розподілу, що відповідає вірогідності метрологічної справності РМ.С..
– коефіцієнт нормального розподілу, що відповідає вірогідності метрологічної справності РМ.С..
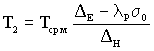
Прийнявши припущення про те, що випадковий процес зміни в часі похибки ЗВТ полягає в лінійній зміні середнього значення похибки (за сукупністю ЗВТ даного типу) при незмінному СКВ розподілу похибки s оцінка МПІ Т2 визначається за формулою
 . (1.146)
. (1.146)
За знайденими МПІ Т1 і Т2 встановлюють кінцевий міжповірний інтервал ЗВТ Т = min[Т1, Т2].
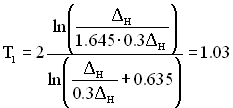
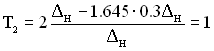
Приклад 1.10. Нормують Рм(t) = 0.95 за напрацювання t = 1000 год. Середнє завантаження ТЗ – 80 год. в місяць. СКВ s0 = 0.2Dн, а DЕ = 0,8Dн.
Визначіть МПІ Т за умови, що Рм.с.(Т) = 0.90.
Розв’язування:
При інтенсивності експлуатації ЗВТ 80 год. в місяць і напрацюванні 1000 год. календарний строк експлуатації складає 1 рік. Квантилі нормального розподілу відповідно до довідникових даних складають l0,95 = = 2, l0,90 = 1,645. Підставивши ці дані в рівняння (1.131) та (1.132), отримаємо:
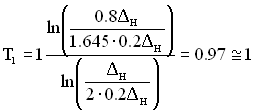 рік;
рік;
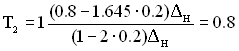 року.
року.
Отже, МПІ Т приймаємо рівним Т = min[1, 0.8] = 0.8 року, що відповідає 10-ти місяцям.
1.9.2 Середній час до першої метрологічної відмови.
Якщо вдається визначити, хоча б приблизно, середню долю q метрологічних відмов в загальному потоці відмов ЗВТ даного типу, то оцінюють середній час (середнє напрацювання) до першої метрологічної відмови Тср.м
![]() , (1.147)
, (1.147)
де Тср.в – середній час ТЗ до першої раптової відмови (визначається структурним розрахунком надійності ТЗ за даними про інтенсивність відмов його елеметрів).
Якщо q невідомо, то приймають Тср.м = Тср.
На підставі матеріалів, наданих на випробування, визначають СКВ s0 розподілу похибки градуювання ЗВТ при випуску з виробництва, межу DН допустимої похибки (нестабільності) ЗВТ, що пронормована в ТУ, межу DЕ допустимої похибки (нестабільності) ЗВТ в реальних умовах його експлуатації.
Для оцінки МПІ Т1 приймають припущення про симетричність розподілу похибки ЗВТ відносно нуля і МПІ розраховується за формулою
 . (1.148)
. (1.148)
Потім в припущені про лінійний випадковий процес оцінюється МПІ Т2 за формулою
 . (1.149)
. (1.149)
Кінцевий МПІ береться рівним Т = min[T1, T2].
Приклад 1.11. Нормується Тср.м = 3500 год. Середнє завантаження ТЗ -7 год. на добу. Відомо, що СВК s0 = 0.3Dн, DЕ = Dн. Визначіть МПІ Т з умови, що Рм.с. (Т)=0.90.
Розв’язування:
При інтенсивності експлуатації ТЗ 7 год. на добу і напрацюванні 3500 год. календарний строк експлуатації складає 2 роки. Квантиль нормального розподілу λ0,90 = 1,645.
Тому, при підстановці даних в рівняння (1.134) і (1.135) отримаємо:
 року;
року;
 рік.
рік.
Отже, беремо МПІ Т = min[T1, T2] = 1 рік.
1.10 Надійність програмного забезпечення
Дослідження в області програмної надійності знаходяться на початковому етапі свого розвитку.
Доцільно виділити дві сторони програмного забезпечення об'єкта: програмну надійність об'єкта – властивість об'єкта, виконувати задані функції, обумовлені якістю програмного забезпечення; надійність програмного забезпечення – властивість програмного забезпечення виконувати висунуті до нього вимоги.
Програмна надійність ТЗ виявляється при спільній роботі апаратури і програми. Вона характеризує здатність ТЗ виконувати задані функції при умові, що програма буде знаходитися в тому або іншому стані.
Надійність програмного забезпечення характеризує якісний стан програми. Її іноді називають правильністю програми, коректністю програми, надійністю програми.
Програмна надійність об'єкта – це те, що цікавить користувача програми. Для її забезпечення необхідно, щоб програма була правильною, коректною, надійною, тобто щоб вона не містила помилок. Може виявитись, що деякі з помилок зовсім не виявляться при роботі об'єкта або, навпаки, при роботі об'єкта виявляться додаткові помилки програми. Проте очевидно, що необхідною умовою надійної роботи об'єкта є коректність програм, тобто відсутність в них помилок.
Програмна надійність стає особливо актуальною, коли програми є самостійним продуктом. В цьому випадку вони виготовляються, перевіряються і піддаються випробуванням так само, як звичайні об'єкти.
1.10.1 Порівняльні характеристики програмних і апаратних відмов.
Програмні відмови ТЗ і апаратні відмови мають багато спільного, але й багато в чому відрізняються. Спільне в них таке:
а) невиконання об'єктом заданих функцій;
б) проміжки часу до відмов і проміжки часу усунення відмов носять випадковий характер;
в) методи обробки статистичних даних про відмови однакові, а тому статистичні оцінки показників надійності апаратної та програмної, отримані за наслідками випробувань і експлуатації, можуть бути однаковими в своїй назві: середнє напрацювання об'єкта на програмну відмову, інтенсивність програмних відмов об'єкта та ін. Можливі і об'єднані (комплексні) оцінки: середнє напрацювання об'єкта на програмну і апаратну відмову та ін.
Разом з тим відмови програмні відрізняються від відмов апаратних:
а) відмова апаратна залежить або від часу, або від об'єму виконаної роботи, а відмова програмна – від тієї функції, яку виконує ТЗ під управлінням програми (точніше, від того, з якою вірогідністю програма вийде на таку ділянку, що містить помилку);
б) виявлення і усунення апаратної відмови (заміною елемента, що відмовив, справним) не означає, що така ж відмова не повториться при подальшій роботі ТЗ, а виявлення і усунення відмови програмного забезпечення означає, що така відмова надалі не повториться;
в) програмна відмова, що виявляється при автономній перевірці програми, може переходити в розряд недіючих, якщо стан апаратури робить її нечутливою до даного виду програмної відмови. Наприклад, якщо в програмі помилково не передбачений програмний захист від апаратного збою, то це програмна відмова, але якщо при цьому в апаратурі не виникає збою, то відмова програмна стає недіючою;
г) прогнозувати виникнення апаратних відмов порівняно легко, а прогнозувати виникнення окремих програмних відмов важко, а часто і неможливо. Для окремих програмних відмов важко передбачати час, коли вони стають такими, що діють, а коли – недіючими;
д) апаратні відмови доцільно підрозділяти на раптові і поступові, тобто відмови, різні за своєю фізичною природою, за законами розподілу часу до відмови, за методами боротьби щодо зниження їх вірогідності. Програмні ж відмови немає сенсу ділити на раптові і поступові. Вони виникають раптово, як тільки програма переходить на таку ділянку, яка містить помилку. В той же час вони за природою своєю не збігаються з раптовими апаратними відмовами. Вірогідність їх виникнення не пов'язана з тривалістю роботи ТЗ, а пов'язана з умовною вірогідністю того, що програма містить помилку в даній частині програми, і вірогідністю того, що ТЗ працюватиме під управлінням цієї частини програми.
1.10.2 Перевірка і випробування програм.
Випробування програм на надійність і випробування ТЗ на надійність їх програмного забезпечення – обов'язкові етапи при перевірці надійності програмно-апаратних систем.
Випробування з метою перевірки надійності програм здійснюються за допомогою спеціальних програм (тестування) і спеціальних (імітаційних) стендів. Перевіряється при цьому ступінь відпрацювання програми і її відповідність заданим вимогам.
Випробування з метою перевірки надійності ТЗ, що працюють під управлінням програмного забезпечення, здійснюються при спільній роботі програми і ТЗ. Перевіряються при цьому і ступінь відпрацювання програми відповідно до заданих вимог, і коректність цих вимог, і узгодженість взаємодій програми і апаратури.
Ступінь відпрацювання програми може перевірятися різними методами. Чим вища вимога до вірогідності перевірки, тим складніший метод перевірки.
Розглянемо один з найбільш простих методів. В процесі перевірки коректності програми фіксуються інтервали часу виявлення помилок в програмі. Результати перевірки обробляються при таких припущеннях:
а) помилки програми незалежні. Кожного разу після виявлення вони усуваються і надалі не виявляються;
б) інтенсивність помилок зменшується в процесі їх виявлення і усунення (тобто ступінчасто, як показано на рисунку 1.7).
Статистична інтенсивність програмних помилок визначається так само, як інтенсивність апаратних відмов за формулою:
![]() , (1.150)
, (1.150)
де n(t) – кількість ідентичних програм, які не відмовили до моменту часу t;
Δn(t) – кількість ідентичних відмовивших програм на інтервалі часу (t, t+Δt).
Виявлення і усунення помилок проводиться до тих пір, поки значення ![]() буде меншим заданого значення. Задане значення
буде меншим заданого значення. Задане значення ![]() призначається з урахуванням вимог до надійності ТЗ. Орієнтовно можна виходити з того, що інтенсивність програмних помилок, що призводять до відмови, на етапі налагоджувальних випробувань повинна бути не більша інтенсивності апаратних відмов.
призначається з урахуванням вимог до надійності ТЗ. Орієнтовно можна виходити з того, що інтенсивність програмних помилок, що призводять до відмови, на етапі налагоджувальних випробувань повинна бути не більша інтенсивності апаратних відмов.
Положення про те, що при створенні програмного забезпечення великих систем можливе виникнення помилок і що виявлення програмних помилок – надзвичайно важка задача, не тільки не повинно обеззброювати розробників систем, а навпаки, повинно орієнтувати їх на максимальне зосередження сил для ліквідації програмних відмов.
Вплив програмних помилок на надійність ТЗ повинно безперервно зменшуватися з кожним новим етапом освоєння програм (розробка – відлагодження – дослідницька експлуатація – нормальна експлуатація) так, щоб на етапі нормальної експлуатації об'єкта програмна надійність його була на рівні заданих вимог.
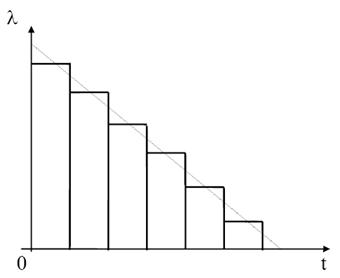
Рисунок 1.7 – Характеристика зміни інтенсивності помилок програмного забезпечення
1.10.3 Основні проблеми дослідження надійності програмного забезпечення.
У складному програмно-керованому технічному засобі будь-якого типу можна виділити дві основні, відносно незалежні частини:
1. Сукупність автономно, паралельно працюючих технічних схем і засобів – апаратна частина.
2. Сукупність програм, орієнтованих на рішення конкретного комплексу завдань, які є математичним забезпеченням ТЗ, утворюють програмну частину (операційна система і робочі програми користувачів).
При загальному аналізі характеристик ТЗ (його надійності) потрібно враховувати, що якщо апаратна частина жорстко задана, незмінна і її надійність може бути забезпечена на необхідному рівні, то програмна частина у кожному окремому випадку може мати ряд модифікацій, є достатньо гнучкою, змінною частиною ТЗ і в забезпеченні сукупної надійності засобу визначає найбільшу кількість помилок.
До основних проблем дослідження надійності програмного забезпечення (ПЗ) відноситься:
1. Розробка методів оцінювання і прогнозування надійності ПЗ на основі сукупності кількісних показників і характеристик, ідентичних показникам апаратної надійності.
2. Визначення чинників, що впливають на досягнення заданого рівня надійності ПЗ.
3. Розробка методів, що забезпечують досягнення заданого рівня надійності ПЗ.
4. Вдосконалення методів підвищення надійності ПЗ в процесі проектування і експлуатації.
Ефективний спосіб підвищення надійності ПЗ – використання методів структурного проектування програм, оскільки залежно від структури ПЗ наслідки окремих помилок можуть бути легко виявлені, локалізовані і виправлені на деякій невеликій ділянці програми або розповсюдитися на інші рівні та модулі ПЗ.