|
Лабораторна робота № 3
Аналіз характеристик сенсорів хвильового фронту
Мета роботи: вивчити структури, схеми та принципи функціонування сенсорів хвильового фронту та оволодіти навиками розрахунків параметрів цих сенсорів, здійснити порівняльний аналіз сенсорів хвильового фронту різних типів.
3.1 Основні теоретичні відомості
Сенсори для систем адаптивної оптики повинні мати такі властивості:
- висока просторова роздільна здатність (багатоканальність);
- високе значення швидкодії;
- узгодженість динамічного діапазону сенсора з проблемою фазової неоднозначності при значних збуреннях (понад 2π рад);
- незалежність результатів фазових вимірів від випадкових змін інтенсивності світла на приймальній апертурі;
- висока чутливість (ефективність використання світлового потоку);
- достатня ширина спектра робочого випромінювання;
- оптимальна ступінь складності сенсора (враховує надійність, вартість, ступінь технічного напрацювання і т. ін.).
Для попередніх оцінок тих чи інших вимог до сенсорів використовують наближені співвідношення, а саме [4].
1. Розрахунок кількості каналів сенсора
(3.1)
де
σ/σs – відносна похибка апроксимації хвильового фронту;
D/ls – відношення діаметра апертури до масштабу неоднорідностей.
2. При гетеродинному та синхронному детектуванні вибір кількості каналів N здійснюють, виходячи з заданої похибки апроксимації хвильового фронту поверхнею адаптивного дзеркала
σст
 . (3.2) . (3.2)
3. Для колмогорівської моделі турбулентності ця кількість може бути вираженою через радіус когерентності атмосфери
 . (3.3) . (3.3)
4. Швидкодію сенсора оцінюють, виходячи з частоти зрізу замкненої системи:
 , (3.4) , (3.4)
де ts – характерний час тривалості неоднорідності.
При невеликій амплітуді фазових збурень (лінійна ділянка дискримінаційної характеристики) характерний час відгуку системи
t » p/wc.
5. Похибка сенсора хвильового фронту залежить від чутливості детекторів. При слабких сигналах точність сенсора обмежується дробовим шумом фотоприймача. Значення похибки обернено пропорційне квадратному кореню від кількості фотонів, прийнятих на інтервалі виміру (при кінцевому часі інтегрування детектора дорівнює відношенню сигнал-шум). При прямому детектуванні (сенсори гартманівського типу) похибка вимірювання хвильового фронту
 (3.5) (3.5)
де S/N – відношення сигнал-шум (SNR).
Для інтерферометрів значення похибки приблизно у
 разів більше. разів більше.
6. Формули для оцінювання співвідношення сигнал-шум для характерних систем з вихідною хвилею:
6.1. Система фазового з’єднання із сенсором Гартмана (на цілі змонтовано кутовий відбивач діаметром d)
 (3.6) (3.6)
де D*, А – гранична роздільна здатність та площа детектора, відповідно;
Dnc – характерна смуга пропускання; d/D – співвідношення діаметрів парціального та загального пучків; Wd/W0
– співвідношення площі кутового відбивача та площі світлової плями; a – коефіцієнт поглинання траси у зворотному ході; Р0 – потужність джерела світла.
6.2. Гетеродинний сенсор із шириною смуги сигналу
 ν ν
 (3.7) (3.7)
де h – квантова ефективність приймача; h, с – відповідно стала Планка і швидкість світла у середовищі.
6.3. Система апертурного зондування (N каналів, відстань між канальними частотами
Dn0 ) на початковому етапі адаптації
 (3.8) (3.8)
де m – відносна глибина модуляції; d0 – діаметр світлової плями;
L – довжина траси.
На кінцевому етапі адаптації
 . (3.9) . (3.9)
3.2 Приклад розрахунку характеристик сенсорів хвильового фронту
Вхідні дані:
-
відносна
похибка апроксимації ХФ – 1/102;
-
діаметр апертури – 10 см;
-
діаметр неоднорідностей – 3 см;
-
похибка апроксимації ХФ поверхнею адаптивного дзеркала – 1/246;
-
радіус когерентності атмосфери – 1,5
см;
-
характерний час неоднорідності 1 мс;
-
гранична
роздільна здатність 10-9 Вт/Гц0.5;
-
площа детектора
78,5 см2;
-
діаметр парціального пучка 1см;
-
співвідношення площ кутового
відбивача та світлової плями 100:1;
-
коефіцієнт поглинання траси 0,7;
-
потужність джерела 10мВт;
-
квантова ефективність приймача 80%;
-
довжина траси 1 км;
-
коефіцієнт модуляції 1.
1. Кількість каналів сенсора Гартмана (пряме детектування)
 . .
2. Кількість каналів гетеродинного сенсора
 . .
3. Кількість каналів при прямому детектуванні (модель турбулентності атмосфери Колмогорова)
 . .
4. Характерний час спрацьовування адаптивної системи

5. Співвідношення сигнал-шум для сенсора Гартмана
 . .
Відповідна похибка вимірювання хвильового фронту:
 . .
6. Співвідношення сигнал-шум гетеродинного сенсора

7. Співвідношення сигнал-шум одноканальної системи апертурного зондування на початковому етапі адаптації

На кінцевому етапі адаптації

Таким чином відношення сигнал/шум (SNR) на кінцевому етапі адаптації такої системи є приблизно у 2,8 разів більшим.
3.3 Завдання та хід виконання роботи
1. Вивчити теоретичні питання, пов’язані з принципами роботи, структурною організацією та функціонуванням оптичних та електричних схем сенсорів хвильового фронту для адаптивних оптичних систем.
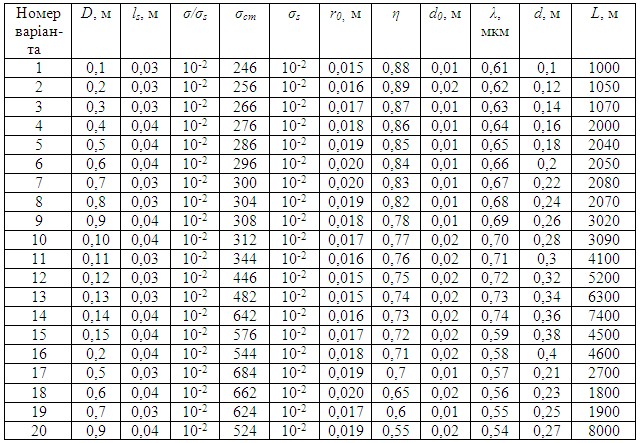
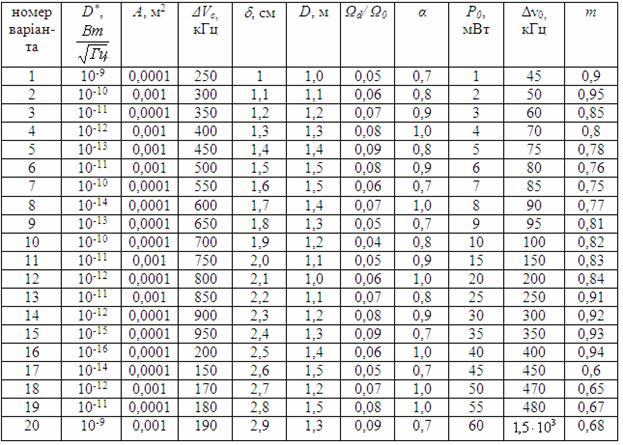
2. За наведеним прикладом згідно з варіантом індивідуального завдання (табл. 3.1) виконати розрахунок характеристик сенсорів хвильового фронту.
3. Побудувати графічні залежності
 та та
 для розрахованих сенсорів. для розрахованих сенсорів.
4. Cкласти звіт.
Таблиця 3.1 – Індивідуальні варіанти завдань
Продовження таблиці 3.1
Контрольні запитання
1. Що таке хвильовий фронт?
2. Що являють собою сенсори хвильового фронту?
3. Джерела спотворення хвильового фронту.
4. Датчик Гартмана. Принцип роботи. Характеристики.
5. Гетеродинний сенсор хвильового фронту. Принцип роботи. Характеристики.
6. Моделі турбулентності атмосфери.
7. Інтерферометри зсуву. Схеми. Характеристики.
8. Порівняльна характеристика сенсорів хвильового фронту.
9. Системи апертурного зондування. Принципи роботи. Характеристики.
10. Швидкодія сенсорів хвильового фронту.
|