7 Геодезичні спостереження за зміщеннямИ і деформаціями споруд
7.1 Загальні відомості про деформації інженерних споруд
Внаслідок конструктивних особливостей, природних умов і діяльності людини споруди в цілому і їхні окремі елементи отримують різного виду деформації. У загальному випадку під терміном деформація розуміють змінення форми об'єкта спостережень. У геодезичній же практиці прийнято розглядати деформацію як зміну положень об'єкта відносно якого-небудь первісного. Спостереження за зсувами, осіданнями і деформаціями споруди мають велике значення для визначення міцності і стійкості споруди, для своєчасного запобігання їх руйнуванню або своєчасного сигналу про настання аварійного стану. Спостереження ведуть з початку будівництва шляхом високоточних і систематичних геодезичних вимірювань. При рівномірному стисканні ґрунтів під дією ваги споруди відбувається осідання споруди, яке з часом зменшується і припиняється. Якщо ґрунти осідають нерівномірно, то залежно від їх характеру і виду можуть відбуватися крени, прогини, перекоси, кручення і розрив споруд. Зміни в просторовому положенні споруди називаються деформаціями, в горизонтальній площині – зсувами, у вертикальній – осіданнями.
Мета геодезичних спостережень за деформаціями будівель і споруд – отримати дані, які характеризують абсолютні величини осідань і зміщень, а також встановити показники їх зміни в часі.
Спостереження за деформаціями споруд являють собою комплекс вимірювальних й описових заходів із виявлення величин деформацій і причин їхнього виникнення. Для складних і відповідальних споруд спостереження починають одночасно із проектуванням. На площадці майбутнього будівництва вивчають вплив природних факторів й у цей же період створюють систему опорних знаків для того, щоб заздалегідь визначити ступінь їхньої стійкості. Спостереження безпосередньо за спорудою починають із моменту початку її зведення й продовжують протягом усього будівельного періоду. Для більшості великих споруд спостереження проводяться й у період їхньої експлуатації. Залежно від характеру споруди, природних умов і т. д. спостереження можуть бути закінчені при припиненні деформацій, а можуть тривати й весь період експлуатації.
Для спостережень використовується вимірювальна мережа, яка складається з таких геодезичних знаків:
репер - геодезичний знак, який закріплює пункт нівелірної мережі (висотне положення цього знака є практично незмінним під час спостережень за деформаціями споруд);
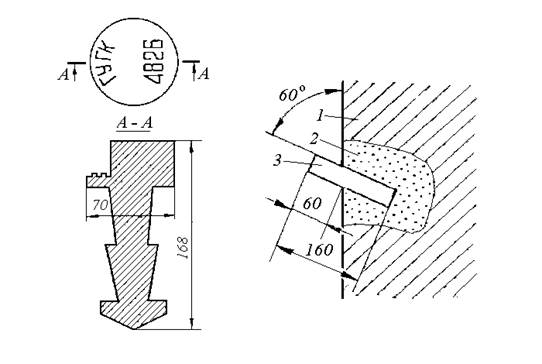
марка - жорстко закріплений на конструкції будівлі знак, який змінює своє висотне та планове положення внаслідок деформацій споруди (приклад стінної марки зображено на рисунку 7.1);
опорний знак - практично нерухомий в горизонтальній площині знак, відносно якого визначаються зсуви та крени споруд.
Репери можуть бути глибинними або ґрунтовими. Глибинний - фундаментальний геодезичний знак, який закладається в ущільнені ґрунти (рис. 7.2). Ґрунтовий - знак, що закладається нижче глибини промерзання ґрунту (рис. 7.3). Всі геодезичні знаки, встановлені на споруді та навколо неї, створюють оглядову та опорну мережі, які пов’язані між собою геодезичними вимірюваннями.
а) б)
Рисунок 7.1 - Стінна марка: а) звичайна; б) спрощена, 1 - стіна; 2 -цементний розчин; 3 - сталевий кутик 30×30×5 мм
Склад геодезичних робіт при вимірюванні зсувів, осідань і деформацій такий:
- Розроблення методів і визначення періодів вимірювання зсувів, осідань і деформацій;
- Розроблення схеми, методів і програми застосування планових і висотних опорних мереж;
- Розроблення конструкцій геодезичних знаків;
- Розроблення періодів і методів перевірки положення знаків опорної мережі;
- Закладання знаків;
- Вимірювання для створення опорної мережі (тріангуляція, полігонометрія, геометричне нівелювання);
- Вимірювання величини горизонтальних і вертикальних зміщень, величин крену і переносу споруди, тріщини і виміри їх розмірів.

а) б)
Рисунок 7.2 - Глибинний репер: а) трубчастий репер, що закладається бурінням: 1 - запресована бронзова головка з хрестовиною; 2, 8 - сальники; 3 - мазут; 4 - цемент; 5 - наварний фонар із сталі; 6 - труба (Æ 150 мм); 7 - труба (Æ 60 мм); 9 - піддон металевий; б) репер з гнучкою реперною штангою: 1 - ричаг; 2 - шкалова марка; 3 - груз; 4 - інварний дріт; 5 - захисна труба; 6 - труба-люк; 7 - сальник; 8 - шток; 9 - горизонт прилада

а) б)
Рисунок 7.3 - Ґрунтовий репер: а) трубчастий на бетонному фундаменті: 1 - люк; 2 - кришка; 3 - реперна головка (Æ 2–4 см); 4 - цегляний або бетонний збірний колодязь; 5 - реперна труба (Æ 7–8 см); 6 - захисна труба (Æ 12–15 см); 7 - бетонна підготовка; 8 - хомут для утримання захисної труби; 9 - анкерний лист; 10 - бетонна подушка; 11 - шлак; б) пальовий: 1 - люк; 2 - цегляний або бетонний збірний колодязь; 3 - реперна головка (Æ 2–4 см); 4 - шлак; 5 - бетонна підготовка при встановленні в котлован; 6 - паля; 7 - бітум
Крім геодезичних робіт при вимірюванні зсувів, осідань і деформацій споруд виконуються такі роботи:
- дослідження фізико-механічних властивостей ґрунтів як основ споруди;
- дослідження режимів ґрунтових вод;
- дослідження напруги під фундаментом;
- спостереження за зміною температури.
На кожному етапі зведення або експлуатації споруди спостереження за його деформаціями виконують через певні проміжки часу. Такі спостереження, проведені за календарним планом, називаються систематичними.
У випадку появи фактора, що призводить до різкого змінення звичайного ходу деформації (зміна навантаження на фундамент, температури навколишнього середовища або самої споруди, рівня ґрунтових вод, землетрус та ін.), виконують термінові спостереження. Паралельно з вимірюванням деформацій для виявлення причин виникнення організують спеціальні спостереження за зміною стану й температури ґрунтів і підземних вод, температурою споруди, за зміною метеоумов і т. п. Ведеться облік зміни будівельного навантаження й навантаження від установленого устаткування.
7.2 Методи спостереження за осіданням споруди
Для вимірювання величини осідання, тобто зміщення споруди у вертикальному напрямку застосовують методи: фотограмметричний, гідростатичний, мікронівелювання, геометричного і тригонометричного нівелювання.
Найбільш універсальним способом спостереження за осіданням є періодичне високоточне геометричне нівелювання геодезичних марок 1, 2, 3 ... 20 (рис. 7.4). Для спостереження в тіло споруди, починаючи з фундамента, закладають осадочні марки і репери. У фундаменти закладають марки з напівсферичною головкою. Ці марки встановлюють вздовж осі фундаментів, що дає змогу виявити прогини і перекоси в різних напрямках.

Рисунок 7.4 – Схема розташування марок, нівелірних ходів для спостережень за осіданнями споруд способом геометричного нівелювання (а), конструкція марки в стіні будівлі (б)
Як висотна основа, відносно якої визначається осідання марок на споруді, слугує мережа фундаментальних глибинних реперів, які визначають сфери можливих осідань грантів. Їх, як правило, закладають завчасно на глибину, більшу за глибину промерзання грантів в даному районі. Кількість реперів повинна бути не менше 3 - 4 (гл. Rp 1, 2, 3 рис. 7.4), щоб шляхом періодичних спостережень встановити їх на весь період вимірювання деформацій. Спостереження за осіданнями виконують циклами один раз на квартал, один раз на півроку, один раз на рік і т. д., до стабілізації осідань, тобто коли їх швидкість буде становити 1 - 2 мм на рік.
Способом геометричного нівелювання можна визначати різниці висот точок, розташованих на відстані 5 – 10 м, з похибкою 0,05 – 0,1 мм, а на кілька сотень метрів – з похибкою до 0,5 мм.
Залежно від необхідної точності визначення осідань застосовуються різні класи нівелювання. Так, наприклад, при визначенні осідань бетонних гребель гідровузлів застосовують I й II класи, які характеризуються середньою квадратичною похибкою визначення перевищення на одну станцію відповідно 0,3 й 0,4 мм. При визначенні осідань промислових і цивільних будівель найчастіше застосовують II й III класи, для яких середньоквадратичні похибки визначень перевищення на станції відповідно дорівнюють 4 й 0,9 мм.
Відмітки деформаційних точок у циклі вимірювань визначають відносно вихідного опорного репера. Відмітку вихідного репера найчастіше приймають умовно, наприклад 100,000 м, але вона стала на весь період спостережень. Для передачі відмітки від вихідного на всі деформаційні репери, розробляють спеціальну схему (рис. 7.4). При виконанні вимірювань залежно від класу нівелювання застосовують спеціальну методику й відповідні прилади. Так, при вимірах високої точності використовують ретельно вивірені високоточні нівеліри типу Н-05, штрихові інварні або спеціальні малогабаритні рейки. Нівелір встановлюють чітко по середині між спостережуваними точками, відліки беруть по основній і додатковій шкалах рейок. Нівелювання виконують при двох горизонтах приладу, у прямому й зворотному напрямках. Довжина візирного променя допускається до 25 м, його висота над поверхнею землі або підлоги - не менше 0,5 м. Нівелювання виконується тільки при цілком сприятливих умовах видимості й при досить виразних, спокійних зображеннях штрихів рейок. Дотримуються й інших запобіжних заходів, що забезпечують високу точність робіт. За отриманими результатами спостережень кожного циклу визначають позначки марок, абсолютне осідання ![]() , мм, швидкість осідання
, мм, швидкість осідання ![]() , мм/рік, будують графіки осідань (рис. 7.5).
, мм/рік, будують графіки осідань (рис. 7.5).
![]() , (7.1)
, (7.1)
де ![]() – абсолютне осідання споруди, мм;
– абсолютне осідання споруди, мм;
![]() – позначки марки в наступному і попередньому циклах, м.
– позначки марки в наступному і попередньому циклах, м.
 , (7.2)
, (7.2)
де ![]() – швидкість осідання споруди, мм/рік;
– швидкість осідання споруди, мм/рік;
![]() – середнє осідання споруди за період спостереження
– середнє осідання споруди за період спостереження ![]() .
.
Якщо значення ![]() знаходиться в межах 1 - 2 мм/рік, вважають що положення споруди стабільне.
знаходиться в межах 1 - 2 мм/рік, вважають що положення споруди стабільне.
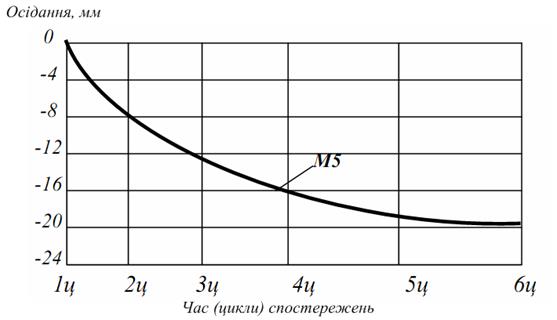
Рисунок 7.5 - Графік осідання марки М5
Спосіб тригонометричного нівелювання дозволяє визначати осідання точок, розташованих на істотно різних висотах, у важкодоступних місцях. Такі випадки виникають при спостереженнях за високими будинками, вежами, греблями, при проведенні вимірів через перешкоди. Найбільш висока точність, близько 0,1 мм, забезпечується при коротких (до 100 м) променях візування із застосуванням високоточних теодолітів типу ЗТ2 і спеціальної методики вимірювань, що дозволяє вимірювати зенітні відстані з похибкою 5". Крім того, методика передбачає однотипне у всіх циклах установлення теодоліта і його ретельне дослідження, строгу вертикальність рейок, вибір часу й умов спостережень для зменшення впливу вертикальної рефракції, а також ряд інших заходів, спрямованих на ослаблення дій різних джерел похибок. Відстані до обумовлених точок повинні вимірятися з похибкою 3 - 5 мм.
Спосіб мікронівелювання застосовують при спостереженнях за взаємним висотним положенням близько розташованих точок на відстані 1 - 1,5 м. Такі завдання виникають при вивченні осідань і нахилів окремих конструкцій: фундаментів, балок, ферм, технологічного устаткування. Вимірювання виконують за допомогою мікронівеліра.
Гідронівелювання забезпечує таку ж точність, як і геометричне нівелювання, але дозволяє створювати стаціонарні автоматизовані системи з дистанційним зніманням інформації. При використанні гідростатичного нівелювання застосовують різні системи, конструкція яких залежить від умов проведення робіт, необхідної точності та від способу вимірювання положення рівня рідини відносно відлікових штрихів вимірювальних посудин. Найпростіша система, що використовується на гідротехнічних спорудах, складається з відрізків металевих труб, покладених на стрижнях, що закладені у стіну. Відрізки труб з'єднуються між собою шлангами. Над трубою в точках, між якими систематично визначаються перевищення, у стіну вставляються марки з посадковими втулками для переносного вимірника. При вимірюваннях вимірник встановлюється у втулку марки. Обертанням мікрометреного гвинта вимірника досягається контакт вістря штока з рідиною, про що свідчить загоряння сигнальної лампочки. У цей момент береться відлік на барабані мікрометра. При прив'язуванні гідростатичної системи до опорної нівелірної мережі на марку замість вимірника встановлюється нівелірна рейка. Існують автоматизовані системи гідростатичного нівелювання, у яких зміна положення рівня рідини в посудинах визначається автоматично за допомогою електричних або оптико-електронних датчиків.
Фотограмметричний спосіб передбачає застосування фототеодоліта для фотознімання об'єкта. Визначення деформацій взагалі й зокрема осідань цим способом полягає у вимірюванні різниці координат точок споруди, що знайдені на фотознімках початкового (або попереднього) циклу та фотознімках деформаційного (або наступного) циклу. Деформації визначаються в одній вертикальній площині, тобто в площині, паралельній площині фотознімка. При фотограмметричному способі фотографування виконують із однієї точки при незмінному положенні фотокамери в циклах. Для обчислення деформацій, крім вимірювань координат або паралаксів, на знімках необхідно знати відстань фотокамери від об'єкта та фокусну відстань об'єктива фотокамери.
7.3 Горизонтальні зміщення споруд та способи їх визначення
Послідовність виконання геодезичних робіт із визначення горизонтальних зміщень:
- розроблення програми спостереження з вказанням методів спостереження і необхідних для нього приладів;
- розміщення опорних і контрольних пунктів спостереження;
- організація спостережень і оброблення отриманих результатів.
Опорні пункти спостереження виміряють і закріплюють поза зоною можливих зміщень грантів. Перед кожним циклом спостереження перевіряють їх.
Для вимірювань величин зсуву споруди в горизонтальному напрямку застосовують методи:
- створних спостережень;
- тріангуляційний;
- фотограмметричний.
Створний метод (повного створу, напівстворів, четвертних створів, послідовних та частих створів (рис. 7.6), рухливої марки, малих кутів) широко застосовують для дослідження деформацій споруд прямолінійної форми, коли величину зсуву достатньо знати по одному напрямку (рис. 7.5). При цьому координатну систему вибирають так, щоб з напрямком зсувів збігалася вісь ординат, а з напрямком створу - вісь абсцис. Величини зсувів знаходять за різницею значень ординат (нестворностей), визначених у двох циклах.
Гребля

Рисунок 7.5 - Визначення горизонтального зміщення споруди створним методом: а) спосіб рухливої марки; б) спосіб малих кутів
Суть способу рухливої марки: візирну вісь інструмента направляють у напрямку створа Р1-М-Р2. величина зсуву марки зі створом визначається шляхом зміни створних кутів високоточних теодолітів або за допомогою відлікового приладдя на марці.
При вимірюванні малого кута (рис. 7.5, б) горизонтальне зміщення q визначається за формулою:
 , (7.3)
, (7.3)
де ![]() – відстань від геодезичного пункта до марки, м;
– відстань від геодезичного пункта до марки, м;
![]() = 206265" – число секунд в радіанах;
= 206265" – число секунд в радіанах;
![]() - створний кут, виміряний з точністю до
- створний кут, виміряний з точністю до ![]() .
.
В способі послідовних створів (рис. 7.6, а) передбачено визначення нестворностей ![]() точки 1 від створа
точки 1 від створа ![]() , 1-2,
, 1-2, ![]() точки 2 від створа
точки 2 від створа ![]() ,
, ![]() точки 3 від створа
точки 3 від створа ![]() і т. д. В цьому випадку нестворність
і т. д. В цьому випадку нестворність ![]() будь-якої i-ї точки відносно загального створа
будь-якої i-ї точки відносно загального створа ![]() та відомої відстані
та відомої відстані ![]() може бути визначена за формулою:
може бути визначена за формулою:
 . (7.4)
. (7.4)

Рисунок 7.6 – Визначення горизонтального зміщення споруд способом послідовних (а) та окремих (б) створів
В способі окремих створів (рис. 7.6, б) нестворність ![]() точки 1 визначається від створа 1-2,
точки 1 визначається від створа 1-2, ![]() точки 2 від створа 1-3,
точки 2 від створа 1-3, ![]() точки 3 від створа 2-4 і т. д. В цьому випадку нестворність
точки 3 від створа 2-4 і т. д. В цьому випадку нестворність ![]() будь-якої i-ї точки відносно загального створа
будь-якої i-ї точки відносно загального створа ![]() може бути визначена за формулою:
може бути визначена за формулою:
 . (7.5)
. (7.5)
Метод тріангуляціїзастосовується при неможливості створення прямолінійних створів (рис. 7.7).
Суть способу: з тригонометричних пунктів А, В, С за допомогою засічок періодично визначають координати пунктів 1, 2, 3 на споруді. Шляхом порівняння координат визначають лінійні зміщення точок споруди. Горизонтальні кути вимірюють з точністю ![]() . Горизонтальні зміщення отримують визначенням різниці координат в і-му та початковому циклах. Метод тріангуляції складний і потребує значного об’єму обчислень.
. Горизонтальні зміщення отримують визначенням різниці координат в і-му та початковому циклах. Метод тріангуляції складний і потребує значного об’єму обчислень.
При визначенні деформації великих гідротехнічних споруд застосовують комбінований спосіб створних спостережень. Спостереження за зміщенням точок виконують створом, а стійкість опорних точок, із яких виконуються створні спостереження, контролюється тригонометричним способом із пунктів тригонометричної мережі.

Рисунок 7.7 – Визначення горизонтального зміщення споруди методом триангуляції A, B, C – опорна мережа; 1, 2, 3 – марки.
7.4 Вимірювання кренів споруд
Крени – види деформації, властиві спорудам баштового типу. Поява крену може бути викликана як нерівномірністю осідання споруди, так і вигином і нахилом верхньої її частини через однобічне температурне нагрівання та вітрового тиску. У зв'язку із цим повну інформацію про крени й вигини можна одержати лише за результатами спільних спостережень за положенням фундаменту та корпуса баштової споруди.
Вимірювання кренів та осідань споруди мають виконуватись відповідно до технічного завдання, яке розробляє проектна організація, що запроектувала споруду. У технічному завданні регламентують: допустиму точність визначення кренів та осідань, схему розміщення візирних та осадкових марок, періодичність та строки спостережень, вимоги до побудови геодезичної планової та висотної мережі. На основі технічного завдання геодезична служба спостереження за кренами та осіданнями розробляє проект виконавчих геодезичних робіт, який складається з такого:
- розрахунок необхідної точності геодезичних вимірювань, що виконують в кожному циклі спостережень за кренами та осіданнями споруд;
- вибір та обґрунтування планово-висотної геодезичної мережі, а також схему її побудови з позначенням усіх реперів, знаків та центрів опорних пунктів;
- конструкції осадкових та візирних марок та спосіб їх закріплення;
- вибір та обґрунтування методів і приладів для визначення кренів та осідань споруди;
- методика геодезичних вимірювань, що відповідає вибраному методу;
- перелік необхідного обладнання та приладів;
- календарний план виконання робіт;
- обробка результатів вимірювань;
- розрахунок кількості виконавців;
- кошторис на виконання робіт.
При складанні проекта необхідно максимально використовувати всі геодезичні та топографічні матеріали, що знаходяться на території будівельного майданчика.
Залежно від виду й висоти споруди, технічних вимог та умов спостережень для визначення крену застосовують різні способи: координат, горизонтальних кутів, малих кутів, вертикального проектування, зенітних відстаней, високоточного нівелювання осадкових марок, напрямку з одного опорного пункту, стереофотограмметрії.
В сучасній практиці найбільше розповсюдження мають перших чотири способи як найбільш доступні та достатньо точні і надійні при визначенні кренів споруд. Ці способи однакові за складом вимірювань та базуються на принципі вимірювання та проектування напрямків “пункт спостереження – центр верхнього або нижнього пояса споруди”, утворюють пряму кутову засічку. Найбільш універсальним є спосіб координат.
Для визначення кренів способом координат необхідно знати координати пунктів спостережень в прийнятій системі координат. Останні визначаються шляхом включення пунктів спостережень в геодезичну мережу, що створюється навколо споруди відомими методами геодезії, пункти якої пов’язані між собою виміряними напрямками та лініями.
Взаємне положення пунктів спостережень та споруди має задовольняти такі вимоги: розташування в місцях, що забезпечують стабільність їх положення та максимальне збереження, видимість не менше, ніж ¾ висоти споруди, найбільш зручну геометричну форму засічки, відстань близько 2 – 3 висот від споруди. Найзручнішою формою засічки є та, при якій кут засічки прямий. Під час експлуатації періодичність спостережень за кренами та осіданнями визначається залежно від швидкості стабілізації осідання грантів основи, інженерно-геологічних умов та стану споруди. У цей період проводиться не менше трьох циклів на рік.
Під час знаходження величин кренів споруди способом координат визначають в кожному циклі спостережень прямою кутовою засічкою одночасно з трьох – чотирьох пунктів координати верхнього, а в початковому циклі і центра нижнього перерізу, в прийнятій системі координат.
Для прикладу наведемо використання способу координат для визначення крену споруди з трикутною основою (рис. 7.8).
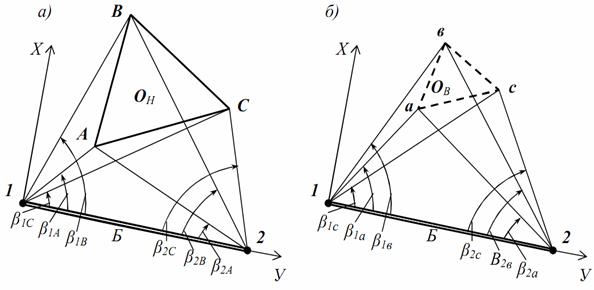
Рисунок 7.8 – Схеми до визначення координат а) нижніх та б) верхніх точок споруди трикутної форми
Спочатку визначають вершини координат верхнього та нижнього трикутників, та знаходять координати їх ортоцентрів. За координатами ортоцентрів шляхом вирішення оберненої геодезичної задачі отримують всю необхідну інформацію. Поруч зі спорудою розбивають базис 1 – 2 з відомою довжиною Б. Теодолітні станції 1 та 2 розташовують довільно, на відстані від споруди не менше півтори – дві висоти так, щоб з них було видно нижні АВС та верхні авс точки, а кути знаходились в межах 30 – 120˚. З точок 1 та 2 теодолітом вимірюють горизонтальні кути ![]() ,
, ![]() ,
, ![]() та
та ![]() ,
, ![]() ,
, ![]() на нижні точки АВС, а також
на нижні точки АВС, а також ![]() ,
, ![]() ,
, ![]() , та
, та ![]() ,
, ![]() ,
, ![]() , на верхні точки споруди авс. Далі розрахунки проводять в умовно вибраній системі координат, в якій вісь Х є перпендикулярною до базису 1 – 2, вісь Y збігається з напрямком базису, початок координат в точці 1 має координати (0; 0), а точка 2 (0; Б). Тоді координати вершин споруди з основою трикутної форми можна визначити за формулами:
, на верхні точки споруди авс. Далі розрахунки проводять в умовно вибраній системі координат, в якій вісь Х є перпендикулярною до базису 1 – 2, вісь Y збігається з напрямком базису, початок координат в точці 1 має координати (0; 0), а точка 2 (0; Б). Тоді координати вершин споруди з основою трикутної форми можна визначити за формулами:
 ,
,  ,
,  , (7.6)
, (7.6)
 ,
,  ,
,  , (7.7)
, (7.7)
 ,
,  ,
,  , (7.8)
, (7.8)
 ,
,  ,
,  . (7.9)
. (7.9)
В рівносторонніх трикутниках АВС та авс координати ортоцентрів ![]() та
та ![]() знаходять за формулами:
знаходять за формулами:
![]() ,
, ![]() , (7.10)
, (7.10)
![]() ,
, ![]() . (7.11)
. (7.11)
За координатами ортоцентрів ![]() ,
, ![]() та вершин АВС, авс шляхом розв’язання обернених геодезичних задач знаходять значення крену К та його напрям tgα.
та вершин АВС, авс шляхом розв’язання обернених геодезичних задач знаходять значення крену К та його напрям tgα.
![]() , (7.12)
, (7.12)
![]() . (7.13)
. (7.13)
Суть способу горизонтальних кутів – в знаходженні складових абсолютного крену та його величини в першому циклі, приростів крену в наступних циклах за результатами вимірювань горизонтальних напрямків на центри верхнього середнього та нижнього середнього перерізів в першому циклі, а також центр тільки верхнього середнього перерізу в наступних циклах (напрями створюють пряму кутову засічку). Спосіб горизонтальних кутів (напрямків) передбачає спостереження верхньої точки В споруди з двох закріплених на місцевості геодезичних пунктів 1 та 2 в двох взаємоперпендикулярних напрямках (рис. 7.9). В першому циклі вимірюють горизонтальні кути ![]() та
та ![]() на точку В, в другому циклі знову вимірюють горизонтальні кути
на точку В, в другому циклі знову вимірюють горизонтальні кути ![]() та
та ![]() і знаходять різниці
і знаходять різниці ![]() та
та ![]() , обчислюють прирости крену та його повну величину К за формулами (7.14):
, обчислюють прирости крену та його повну величину К за формулами (7.14):
 ,
,  ,
, ![]() , (7.14)
, (7.14)
де ![]() та
та ![]() – горизонтальні прокладання від опорних точок до точки спостереження В, які можуть бути визначені графічно з плану, виміряні на місцевості, визначені прямою кутовою засічкою з опорних пунктів або визначені розв’язуванням прямої геодезичної задачі, м.
– горизонтальні прокладання від опорних точок до точки спостереження В, які можуть бути визначені графічно з плану, виміряні на місцевості, визначені прямою кутовою засічкою з опорних пунктів або визначені розв’язуванням прямої геодезичної задачі, м.
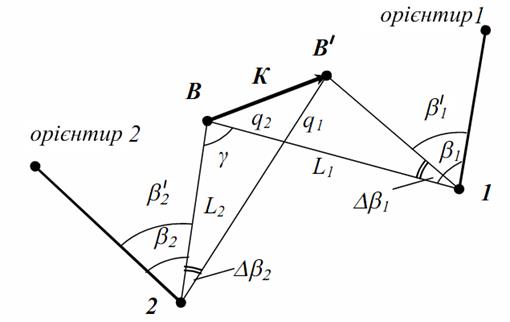
Рисунок 7.9 – Схема до визначення кренів способом горизонтальних кутів
Якщо кут засічки відрізняється від 90º, то значення крену необхідно визначати за формулою 7.15:
 . (7.15)
. (7.15)
В основі способу малих кутів знаходяться вимірювання на кожному з 3 – 4 пунктів спостережень, малого горизонтального кута між напрямками на центр свого (для даного пункту) найбільш низького пояса та центр верхнього пояса. Розглянемо спосіб малих кутів на прикладі башти трикутної форми (рис. 7.10). З точок 1, 2, 3, які розташовані від башти на відстані ![]() ,
, ![]() ,
, ![]() , визначено малі горизонтальні кути
, визначено малі горизонтальні кути ![]() ,
, ![]() ,
, ![]() , що характеризують лінійні суміщення
, що характеризують лінійні суміщення ![]() ,
, ![]() ,
, ![]() верхніх точок з осей споруди, які можна визначити за формулою 7.16:
верхніх точок з осей споруди, які можна визначити за формулою 7.16:
 . (7.16)
. (7.16)

Рисунок 7.10 – Схема до визначення кренів споруд способом малих кутів
Точність визначення суміщень ![]() ,
, ![]() ,
, ![]() за формулою 7.16 може бути оцінена таким чином:
за формулою 7.16 може бути оцінена таким чином:
 , (7.17)
, (7.17)
де ![]() – середньоквадратичні похибки визначення відстаней
– середньоквадратичні похибки визначення відстаней ![]() та кутів
та кутів ![]() .
.
Спосіб вертикального проектування використовується для спостережень за нахилом невисоких споруд при умові достатньої видимості та доступа до їх нижніх частин. Спосіб є зручним для визначення вертикальності споруди та в процесі будівництва. У способі вертикального проектування із двох станцій 1 та 2 (рис. 7.11), розташованих на взаємно перпендикулярних осях споруди та на відстані від неї в півтори-двi висоти, за допомогою теодоліта проектують верхню точку на деяку площину у фундаменті споруди (цоколь, рейку, палетку та ін.

Рисунок 7.11 – Визначення кренів споруд способом вертикального проектування
Величину повного крену знаходять за формулою 7.18:
![]()
![]() , (7.18)
, (7.18)
де ![]() ,
, ![]() – вектори крену з пунктів 1 та 2, які визначені за формулою:
– вектори крену з пунктів 1 та 2, які визначені за формулою:
 , (7.19)
, (7.19)
де ![]() – відлік по рейці, мм,
– відлік по рейці, мм,
![]() – відстань від теодоліта до рейки, м,
– відстань від теодоліта до рейки, м,
![]() – відстань від рейок до точок візування (рис. 7.12), м.
– відстань від рейок до точок візування (рис. 7.12), м.
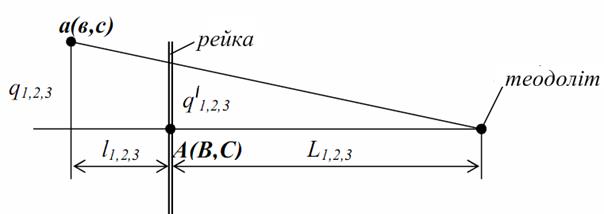
Рисунок 7.12 – Визначення векторів крену способом вертикального проектування
У способі зенітних відстаней при визначенні крену труби на продовженні двох взаємо перпендикулярних діаметрів вибраного цокольного діаметра необхідно змонтувати чотири кронштейни з пристроями для примусового центрування з таким розрахунком, щоб осі обертання теодолітів, знаходилися на однакових відстанях від поверхні споруди. Для спостережень цим способом споруд з квадратним або прямокутним перерізом встановлення марок та кронштейнів необхідно виконувати відповідно на діагоналях та по центру сторін верхнього та цокольного перерізу. З кожного кронштейна визначають малу зенітну відстань напряму на марку.
Спосіб високоточного нівелювання заснований на високоточному геометричному або гідростатичному нівелюванні марок осідання. Принцип розташування марок такий самий, як і у способі зенітних відстаней. В кожному циклі спостережень виконують високоточне нівелювання марок осідання. Для того, щоб зменшити вплив систематичних похибок на результати вимірювань, геометричне нівелювання виконують кожен раз за тією ж самою схемою ходу, що ґрунтується не менше ніж на 3 реперах, які закладені поза зоною осідання спеціально для вимірювання осідань. Цим способом можна визначати тільки приріст або крен між двома циклами спостережень, а не його фактичне значення, що складається з величини крену до початкового циклу спостережень та наступних результатів спостережень, тому цей спосіб рекомендовано як контрольний.
Спосіб напрямку з одного пункту дозволяє визначати суміщення центра верхнього перерізу, тобто складові крену, за осями умовної системи координат, початок якої збігається з центром нижнього цокольного перерізу, а вісь ординат суміщена з напрямком “пункт спостережень – центр цокольного перерізу”, тобто точки 0 – 1 (рис. 7.13).
Можливість сучасних електронних тахеометрів видавати на екран дисплея просторові координати точок спостереження дозволяє реалізувати цей спосіб. З точки 1 визначають умовні координати Х та Y4 точки 4 в системі координат ![]() . Обчислюють
. Обчислюють ![]() та за значеннями
та за значеннями ![]() та
та ![]() знаходять крен К та його напрям.
знаходять крен К та його напрям.
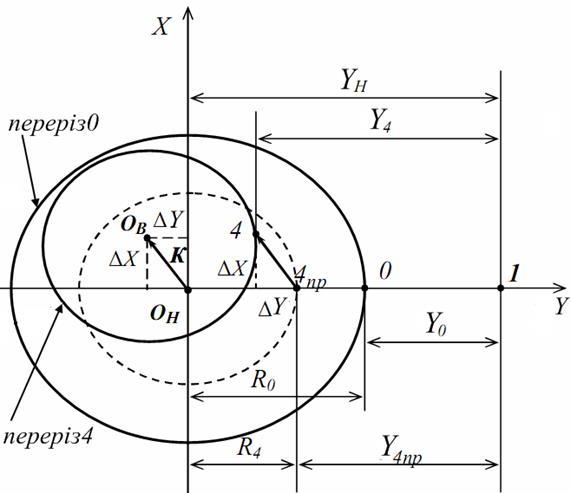
Рисунок 7.13 – Спосіб напрямку з одного пункта
Вимірювання деформацій методом фотограмметрії полягає в визначенні різниці координат точок споруди, що знайдені по фотокартках нульового цикла та фотокартках наступних циклів. В цьому методі спостережень на споруду встановлюють марки, а потім фотографують через певний проміжок часу, при цьому місцеположення та орієнтування камери залишають незмінними. Це необхідно для забезпечення постійного положення фотознімків у просторі під час знімання. Таке положення визначається елементами внутрішнього та зовнішнього орієнтування. Елементи внутрішнього орієнтування (фокусна відстань f фотокамери та координати x0 , z0 головної точки О знімка) визначають положення задньої вузлової точки об’єктива відносно фотознімка. Елементи зовнішнього орієнтування (лінійні: XS, YS, ZS – координати центра об’єктива в прийнятій системі координат XYZ; кутові: кути повороту фотознімку навколо осей X, Y та Z) визначають положення фотознімка відносно прийнятої системи координат. Для фото топографічного знімання споруд використовують фототеодоліти, вимірювальні та стереофотограмметричні камери. Фототеодоліт отримано з’єднанням теодоліта з фотокамерою. Теодоліт необхідний для визначення положення оптичної осі фотокамери у просторі та правильного встановлення площини знімка у момент знімання. Фототеодоліти класифікуються за форматом кадра (6×9, 10×15, 13×18, 18×24 і т. д.), за кутом поля зору, фокусною відстанню та іншими параметрами. Розрізняють фотограмметричний (від грецького photos – світло, gramma – запис, metro – вимірюю) та стереофотограмметричний методи визначення деформацій. Перший метод призначено для визначення деформацій в одній площині, другий – у будь-якому напрямку. При стереофотограм-метричному способі визначення деформацій об'єкт спостереження фотографується з двох станцій (базис В) в результаті чого отримують пару перемежованих знімків.
Контрольні запитання для самоперевірки знань
- З якою метою виконують геодезичні спостереження за зміщеннями та деформаціями будинків і споруд?
- Назвіть основні види деформацій будинків і споруд, що є предметом (об'єктом) геодезичних спостережень.
- Які основні причини появи деформацій споруд?
- Які способи і прилади використовують для вимірювання горизонтальних зміщень (зсувів) елементів конструкцій будинків?
- Що служить висотною основою при геодезичних спостереженнях за осіданнями споруд, як вона використовується?
- Що таке крени споруди?
- Які відомі способи визначення кренів споруди?
- Для чого потрібні різні геодезичні знаки?