1.5.2 Приклади розрахунку
– Накреслити розрахункову схему (stttlement scheme) споруди, вказати розміри та навантаження.

– Необхідною умовою кінематичного аналізу системи є перевірка її за формулою П. Л. Чебишова:
| W= 3D-2Ш-С0, | (1.5.1) |
де W – ступінь вільності споруди;
D – кількість простих дисків;
Ш – кількість одиночних шарнірів (одиночний шарнір з’єднує два стержні);
С0 – кількість опорних стержнів системи.
Оскільки задані системи є несучими конструкціями, вони мають бути геометрично незмінними, тобто ступінь вільності споруди W має дорівнювати нулю.
W1=3·2-2·1-4=0; W2=3·2-2·1-4=0;
W3=3·3-2·3-3=0; W4=3·1-2·0-3=0; W5=3·4-2·4-4=0.
Достатньою умовою перевірки геометричної незмінності системи є перевірка її за способом утворення. Складні рами є комбінацією декількох простих рам. Складну раму можна розбити на прості лише одним способом. Для цього необхідно виділити основну раму (раму 1 поверху), до якої приєднується проста рама другого поверху і так далі.

Визначення опорних реакцій в складних рамах розпочинається з простих рам вищого поверху. Записуються рівняння рівноваги. Знайдені опорні реакції рам вищого поверху прикладаються у вигляді відпору до рам нижнього поверху і при розрахунку рам нижнього поверху розглядаються у вигляді зовнішнього навантаження, рис. 1.5.3.
Для побудови епюр M, Q, N позначають характерні перерізи рам.
Епюри моментів будуються зі сторони розтягнутого волокна. Згинальний момент в перерізі рами визначається як алгебраїчна сума моментів всіх сил, розташованих з однієї сторони перерізу.
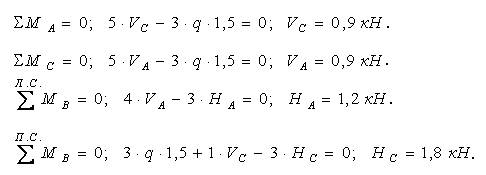
Опорні реакції в рамах, які мають замкнений контур, визначаються загальним способом запису рівнянь статики:
∑M=0; ∑Y=0; ∑X=0. (1.5.2)


Розрахунок починається з рами другого поверху, рис. 1.5.4.
∑Mc
2VB – 3q*1,5=0; VB=4,5 кН.
∑Y=0;
HC – 2*3=0; HC=6 кН
∑X=0; – 2VC+3HC – 2*3*1,5=0; VC=4,5 кН
Далі розраховуються консолі рами першого поверху схеми 1.


Для побудови епюр в складній рамі, що має вигляд замкненого контуру, її зручно розкласти на прості рами. В даному випадку немає можливості провести поверхове розділення складної рами, та для зручності розрахунку першою розраховується арочна рама АКВ. Опорні реакції HC, VC, HD, HD, які визначаються із розрахунку цієї арочної рами, прикладаються в зворотному напрямку до верхньої рами. Тоді опорні реакції в верхній рамі будуть уже відомі, можна проводити розрахунок.




Для визначення шуканого переміщення необхідно вибрати одиничний стан системи. Навантаження одиничного стану має прийматись таким, щоб воно здійснювало роботу на шуканому переміщенні.
Щоб визначити лінійні зміщення точок системи, наприклад, вертикальне зміщення точки Е в схемі 1, в шуканому напрямку прикладається одинична зосереджена сила Р=1 (рис. 1.5.11).

Для знаходження спільного кута повертання (tilt angles) перетинів А і С в схемі 2 прикладаються два одиничних зосереджених моменти в шуканих точках (рис. 1.5.12).

Для визначення кута перелому перетинів в шарнірі (наприклад, в шарнірі С в схемі 3) прикладається пара одиничних зосереджених моментів (рис. 1.5.13).
Для знаходження кутового переміщення системи, наприклад, кута повертання точки К в схемі 4, до шуканої точки прикладається одиничний зосереджений момент М=1 (рис. 1.5.14).
Щоб знайти зближення точок системи, яке знаходиться під дією зовнішніх навантажень, наприклад, зближення точок А і В в схемі 5, достатньо в шуканому напрямку прикласти дві одиничні зосереджені сили (рис. 1.5.15).
Шукане переміщення визначається за формулою Мора:
| (1.5.3) |
де ![]() – внутрішні зусилля в одиничному стані;
– внутрішні зусилля в одиничному стані;
Mp, Qp, Np – зусилля від зовнішнього навантаження в дійсному (вантажному) стані;
EI – згинальна жорсткість;
EA – жорсткість при розтягу чи стисненні;
GA – жорсткість при зсуві;
ρ – коефіцієнт форми перерізу.
При визначенні переміщень в рамах, балках з достатньою для інженерних розрахунків точністю в формулі Мора можна залишити лише першу складову:
 |
(1.5.4) |


При цьому потрібно мати 2 стани системи: дійсний стан та одиничний
стан.
Техніка обчислення інтегралів за формулою Мора полягає в такому:
І. Перемноження дійсної і одиничної епюр можна проводити за правилом А. Н. Верещагіна:
 |
(1.5.5) |
де ωp– площа вантажної епюри ;
уі – ордината на епюрі ![]() під центром ваги площі вантажної епюри.
під центром ваги площі вантажної епюри.
Обмеження при використанні (1.4.5) полягає в тому, що:
- жорсткість стержня по його довжині має бути постійною;
- одна із епюр має бути прямолінійною, тоді друга може бути криволінійною, при цьому площу потрібно брати з криволінійної епюри.

ІІ. Перемножити епюри можна користуючись формулою Карноухова– Сімпсона:
 , , |
(1.4.6) |
де ![]() – ординати епюр моментів одиничного стану на початку, посередині, в кінці стержня;
– ординати епюр моментів одиничного стану на початку, посередині, в кінці стержня;
![]() – ординати епюр моментів вантажного стану на початку, посередині та в кінці стержня;
– ординати епюр моментів вантажного стану на початку, посередині та в кінці стержня;
l – довжина стержня.
Значення обчислених переміщень для схем.
Схема 1

Схема 2.
![]()
![]() .
.
Схема 3.
![]()
![]() .
.
Схема 4.
![]()
![]() .
.
Схема 5.
![]() .
.


