2.2.2 Розрахунок нерозрізної балки на зовнішнє постійне навантаження
Початкова стадія розрахунку нерозрізних балок (not cutting beam) на зовнішнє навантаження в матричній формі пов'язана з визначенням ступеня статичної невизначеності і вибором основної системи (basic system). Ця стадія розрахунку нічим не відрізняється від розрахунку нерозрізних балок звичайним способом.
Нехай для нерозрізної балки виконана перша стадія розрахунку. Для n разів статично невизначної нерозрізної балки при навантаженні її одним варіантом зовнішніх сил система канонічних рівнянь в матричній формі має вигляд:
або ![]() (2.2.1)
(2.2.1)
де Аδ - матриця одиничних переміщень в основній системі від Х1 = Х2 = Х3 = Хn = 1; ![]() - вектор невідомих зусиль;
- вектор невідомих зусиль;
![]() - вектор переміщень в основній системі від зовнішнього навантаження за всіма напрямами Х1, Х2, … Хn.
- вектор переміщень в основній системі від зовнішнього навантаження за всіма напрямами Х1, Х2, … Хn.
Матрицю одиничних переміщень можна записати:
| (2.2.2) |
де Lm01- матриця, транспонована відносно Lm0;
В - матриця піддатливості окремих елементів (ділянок), на які розділяють задану систему, характеризує геометричні розміри і матеріал конструкції;
Lm0 - матриця впливу згинальних моментів в основній системі від кожної сили Х1 = Х2 = … = Хn=1 окремо.
Вектор ![]() можна подати у вигляді
можна подати у вигляді
| (2.2.3) |
Розв’язання матричного рівняння (2.2.1) дає вектор невідомих
| (2.2.4) |
Вектор згинальних моментів в пронумерованих перерізах нерозрізної балки
| (2.2.5) |
| (2.2.6) |
або
| (2.2.7) |
За вектором ![]() будується кінцева епюра згинальних моментів. Вираз (2.2.6) – алгоритм розрахунку статично невизначених систем методом сил в матричній формі. Для його реалізації на ЕОМ треба скласти чотири початкові матриці L0m, В, L0mp , Р.
будується кінцева епюра згинальних моментів. Вираз (2.2.6) – алгоритм розрахунку статично невизначених систем методом сил в матричній формі. Для його реалізації на ЕОМ треба скласти чотири початкові матриці L0m, В, L0mp , Р.
Після отримання значення ![]() проводиться деформаційна перевірка правильності отриманої епюри:
проводиться деформаційна перевірка правильності отриманої епюри:
| (2.2.8) |
При дії на статично невизначену систему кожного з t варіантів зовнішніх дій (до них відносяться постійні навантаження, тимчасові, осідання опор і температура) система канонічних рівнянь має вигляд:
| (2.2.9) |
де Х – матриця невідомих, має t стовпців;
![]() – матриця одиничних переміщень в основній системі від Х1, Х2, … Хn = 1;
– матриця одиничних переміщень в основній системі від Х1, Х2, … Хn = 1;
![]() –матриця переміщень від всіх t варіантів навантажень в основній системі;
–матриця переміщень від всіх t варіантів навантажень в основній системі;
![]() –матриця впливу згинальних моментів в основній системі від всіх t варіантів навантажень
–матриця впливу згинальних моментів в основній системі від всіх t варіантів навантажень ![]() , прикладених роздільно;
, прикладених роздільно;
Р – матриця всіх t варіантів зовнішніх дій.
Розв’язання системи (2.2.9) аналогічне розв’язанню (2.2.4):
| (2.2.10) |
де Х і Δ – матриці.
Згинальні моменти для всіх k перерізів від всіх t варіантів зовнішніх навантажень отримаємо у вигляді матриці:
 . . |
(2.2.11) |
Розглянемо приклад матричного розрахунку нерозрізної балки на постійне і тимчасове навантаження (рис. 2.2.1). Схему балки показано на рис. 2.2.1, а. Розділимо перший і другий прогони на 5 рівних частин, консоль – на 2 частини і пронумеруємо перерізи, в яких будемо визначати згинальні моменти. Основна система і характерні перерізи зображені на рис. 2.2.1, б.
Для визначення початкових матриць ![]() побудуємо епюри моментів в основній системі окремо від таких величин:
побудуємо епюри моментів в основній системі окремо від таких величин:
1) Х1=1 (рис. 2.2.1, в) - ![]() ;
;
2) Х2= 1 (рис. 2.2.1, г) - ![]() ;
;
3) постійного одиничного розподіленого навантаження (рис. 2.2.1, д) - Мq0 постійне;

4)тимчасової одиничної зосередженої сили Р1 (рис. 2.2.1, е) – Мр10тимчасове;
5) тимчасової одиничної зосередженої сили Р2 (рис. 2.2.1, ж) – Мр20тимчасове;
6) тимчасового одиничного розподіленого навантаження qтимчасове (рис. 2.2.1.з) – Мq0тимчасове і обчислимо ординати цих епюр в характерних перерізах.
Для зручності побудови епюр моментів від розподіленого навантаження на рис. 2.2.2 показано проміжні точки квадратної параболи (по середині а=ql2/8). Матриця впливу згинальних моментів Lm0 складена за епюрами ![]() та
та ![]() від Х1 = Х2 = 1 (рис. 2.2.1, г):
від Х1 = Х2 = 1 (рис. 2.2.1, г):
 . . |
(2.2.12) |
де k,n – порядок прямокутної матриці Lm0.

Матрицю піддатливості (pliability) В для всієї балки подамо у вигляді трьох матриць В1, ВІІ , ВІІІ для: консолі, 1 і 2 прогонів
 . . |
(2.2.13) |
Матриця ![]() складається з двох матриць другого порядку
складається з двох матриць другого порядку ![]() і
і ![]() , що відповідають двом ділянкам консолі:
, що відповідають двом ділянкам консолі:
 ; ;   |
(2.2.14) |
Матриці ![]() складаються кожна з п’яти матриць другого порядку:
складаються кожна з п’яти матриць другого порядку:
  ; ;  |
(2.2.15) |
Зважаючи на велике число ділянок розділення (нерозрізна балка має 13 характерних перерізів) матриця піддатливості В виходить дуже громіздкою, що ускладнює процес розрахунку. Для полегшення розрахунків знизимо її порядок. Це можливо, оскільки одиничні і вантажні епюри неперервні на межі ділянок bi і bi+1.
Складемо кутові елементи суміжних матриць bi і bi+1 за схемою
Аналогічно складемо кутові елементи суміжних матриць Bi іBi+1 в сумарній матриці жорсткості:
 ;
; |
(2.2.16) |
Матрицю одиничних переміщень визначимо за (2.2.2):

  ; ; |
(2.2.17) |
Для обчислення добутку матриць зручно скористатися ЕОМ. Якщо розміри матриць, що перемножуються, невеликі, то
і можна скористатися оберненою матрицею одиничних переміщень ![]() . Матриця, обернена до одиничної:
. Матриця, обернена до одиничної:
< ./td> ./td>
| (2.2.18) |
При складанні матриці впливу згинальних моментів від одиничних значень навантажень А0mpзвернемо увагу на епюри ![]()
Матриця А0mp буде складатися з 4 стовпців – за числом епюр моментів від заданих навантажень: ![]() і 13 рядків – за числом вибраних характерних перерізів./
і 13 рядків – за числом вибраних характерних перерізів./
В даному прикладі перший стовпець матриці А0mp відповідає епюрі М в балці в 13 характерних перерізах від навантаження власної ваги ![]() другий стовпець – епюрі М від зосередженої сили Р1 і т.д.
другий стовпець – епюрі М від зосередженої сили Р1 і т.д.
 . . |
(2.2.19) |
Матриця Р від чотирьох варіантів заданих навантажень
 . . |
(2.2.20 |
Матрицю невідомих Х отримаємо за (2.2.10):
 . . |
(2.2.21) |
Матриця шуканих згинальних моментів визначається за (2.2.15):
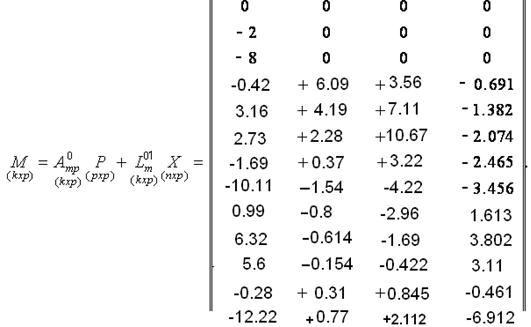 |
(2.2.22) |
Епюри від заданих навантажень наведені на рис. 2.2.3.

На рис.2.2.3, а подано сумарну одиничну еп. ![]() для можливості проведення деформаційної перевірки. Суть деформаційної перевірки – рівність нулю взаємних кутів повертання на опорах – добуток еп.
для можливості проведення деформаційної перевірки. Суть деформаційної перевірки – рівність нулю взаємних кутів повертання на опорах – добуток еп. ![]() на кінцеву епюру згинальних моментів за умови правильної її побудови має бути рівна нулю, відхилення допускається в межах 3%. Деформаційна перевірка еп.
на кінцеву епюру згинальних моментів за умови правильної її побудови має бути рівна нулю, відхилення допускається в межах 3%. Деформаційна перевірка еп. ![]() :
:


