Системи керування електроприводами.
Розрахунок системи підпорядкованого керування електроприводом постійного струму. Курсове та дипломне проектування
Додаток В Приклад розрахунку
Вихідні дані |
|||||||||||||||||||||||||||||||||||||
|
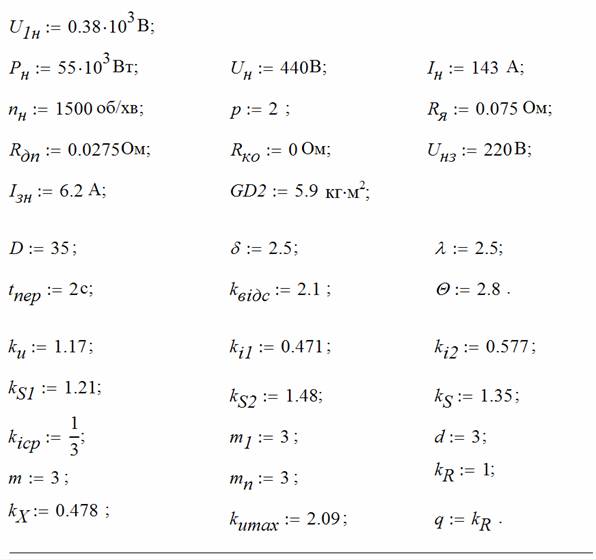
Розрахунок здійснюється для реверсивної системи ТП-Д з трифазною нульовою схемою випрямлення, яка живиться від силової мережі U1н = 0,38 кВ. Параметри електродвигуна вказані в табл. В.1, а вимоги до системи керування електропривода – в табл. В.2. Таблиця В.1 – Паспортні дані електродвигуна
Таблиця В.2 – Вимоги до системи керування
В ППП MathCAD розрахунок можна здійснити у такій послідовності. Вихідні дані та коефіцієнти схеми випрямлення подані так:
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
Визначення параметрів об'єкта керування Розрахунок та побудова характеристик розімкненої системи Розрахунок і вибір регуляторів та елементів їхніх контурів
|
|
|
|
|
|
|