Системи керування електроприводами.
Розрахунок системи підпорядкованого керування електроприводом постійного струму. Курсове та дипломне проектування
Додаток В Приклад розрахунку
Дослідження динамічних характеристик замкненої системи електропривода шляхом комп’ютерного моделювання
В середовищі Simulink (Matlab) схема електропривода з П-регулятором швидкості буде мати вигляд рис. В.4.
Рисунок В.4 – Схема електропривода з П-регулятором швидкості в середовищі Simulink (Matlab)
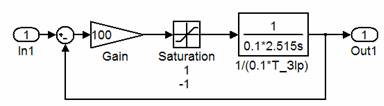
Напругу задання U_зад потрібно взяти рівною 10 В. Задавач інтенсивності ЗІ можна реалізувати як показано на рис. В.5. Верхню та нижню межу блока насичення Saturation рекомендується взяти відповідно 1 та –1.
Рисунок В.5 – Реалізація задавача інтенсивності
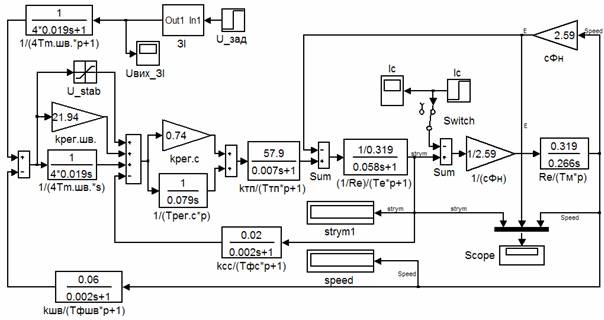
В середовищі Simulink (Matlab) схема електропривода з ПІ-регулятором швидкості буде мати вигляд рис. В.6.
Рисунок В.6 – Схема електропривода з ПІ-регулятором швидкості
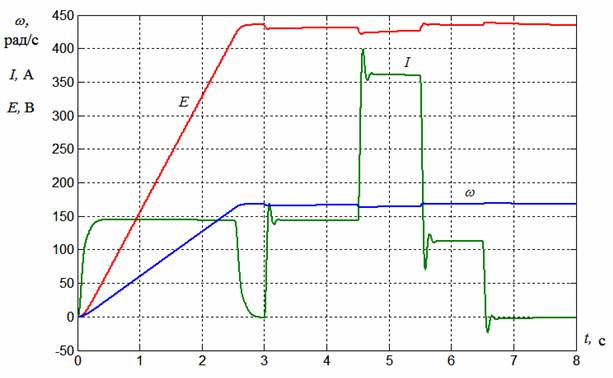
Графіки перехідних процесів електропривода при запуску без навантаження та подальшому накиді номінального навантаження в 3 с, його збільшення в 4,5 с до рівня перевантажувальної здатності lІн = 357,5 А, зменшення в 5,5 с до рівня 0,8Ін = 114,4 А та переведення електропривода в 6,5 с в режим холостого ходу подано на рис. В.7 (з П-регулятором швидкості) та рис. В.8 (з ПІ-регулятором швидкості).
Рисунок В.7 – Графіки
перехідних процесів електропривода
Рисунок В.8 – Графіки
перехідних процесів електропривода
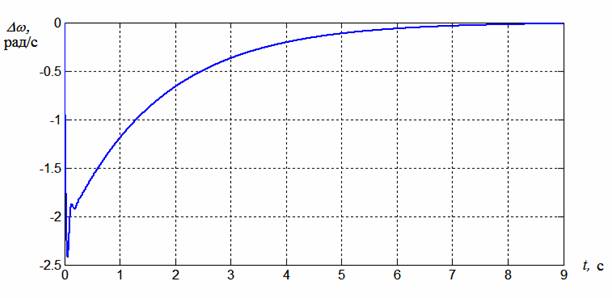
Графік, що характеризує помилку системи електропривода при накиді номінального навантаження (за збурювальною дією) подано на рис. В.9.
Рисунок В.9 – Помилка системи електропривода при накиді номінального навантаження
|
|


|
|
|
|
Визначення параметрів об'єкта керування Розрахунок та побудова характеристик розімкненої системи Розрахунок і вибір регуляторів та елементів їхніх контурів
|
|
|
|
|
|
|