1.4. Приклади електронних систем
Більшість сучасних електронних систем є вбудованими. Робот, такий як марсохід, є вбудованою системою. Стільниковий телефон, PDA, портативний мультимедіа програвач є вбудованими пристроями. Навіть електрична зубна щітка являє собою вбудованну систему. Невеликий мікроконтролер у зубній щітці забезпечує програмне керування швидкістю й індикацію стану заряду батареї. Сучасні автомобілі можуть містити понад сто вбудованих мікроконтролерів. У цілому вбудовані системи складають більшу частину світового виробництва мікропроцесорів.
Як видно з таблиці 1.1, вбудовані системи можна знайти в різноманітних продуктах, включаючи літаки і військові системи, біомедицинські системи, автомобілі, комунікації, комп'ютерні пристрої, електронні інструменти, домашня електроніка, промислове устаткування, офісні машини, персональні пристрої, роботи та інтелектуальні іграшки. Вбудовані електронні системи можна знайти всюди.
Конструктори вбудованих систем часто зіштовхуються зі складними проектними задачами, оскільки вони повинні бути надійними. Багато з них не можуть підлягати ремонту і не можуть бути перезавантажені. Програмне забезпечення неможливо обновити в багатьох вбудованих пристроях. Багато систем мають жорсткі конструкційні обмеження за продуктивністю і споживанням енергії. Деяким системам необхідно працювати від батареї тривалий період часу. У багатьох застосуваннях існують обмеження реального часу і багато систем мають обмежену пам'ять і обчислювальну потужність.
Таблиця 1.1 – Приклади вбудованих систем
Автопілоти літаків, авіоніка і навігаційні системи, системи автоматичної посадки, системи наведення, керування двигуном |
|
Біомедицинські системи |
Системи комп'ютерної томографії й ультразвукового дослідження, моніторинг пацієнтів, кардіостимулятори |
Автомобілі |
Керування двигуном, антиблокувальні гальмові системи, керування подушками безпеки, керування системою обігріву і кондиціонування повітря навігація GPS, супутникове радіо, системна діагностика |
Комунікації |
Комунікаційні супутники, мережні маршрутизатори, комутатори, концентратори |
Споживча електроніка |
телевізори, духовки, програвачі DVD, стереосистеми, системи безпеки, керування поливом газонів, термостати, фотокамери, автовідповідачі, ТV-декодери |
Пристрої в/для комп'ютера |
Клавіатури, миші, принтери, сканери, дисплеї, модеми, пристрої жорстких дисків, пристрої DVD, графічні плати, пристрої USB |
Електронні інструменти |
Системи збору даних, осцилографи, вольтметри, генератори сигналів, логічні аналізатори |
Промислове устаткування |
Керування ліфтами, системи спостереження, роботи, верстати з ЧПК, програмувальні логічні контролери, промислові системи автоматизації і керування |
Офісні машини |
факси-апарати, копіри, телефони, калькулятори, касові апарати |
Персональні пристрої |
стільникові телефони, переносні програвачі MP3, персональні цифрові помічники (PDA), електронні наручні годинники, портативні відеоігри, цифрові камери, системи GPS |
Роботи |
Промислові роботи, автономні транспортні засоби, космічні дослідницькі роботи |
Іграшки |
системи відеоігор, іграшки-роботи типу "Aibo", "Furby", "Elmo" |
Електронні системи реального часу
Системи реального часу (англ. real time system) повинні реагувати на зовнішні параметри введення і створювати нові результати виведення за обмежений час, як показано на рис. 1.6. Час відповіді повинен бути обмежений. Дуже тривалий час відповіді може призвести до відмови систем реального часу.
Ілюстративним прикладом системи реального часу є контролер автомобільної повітряної подушки безпеки. Коли сенсори руху повітряної подушки (акселерометри) розпізнають зіткнення, системі необхідно зреагувати, розкриваючи повітряну подушку протягом 10 мс або ж система не спрацює потрібним чином. На високій швидкості із затримкою більш 10 мс водій уже зіштовхнеться з кермовим колесом до того, як розкриється подушка.
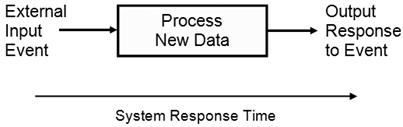
Рисунок 1.6 – Система реального часу
У “м'якій” системі реального часу пріоритети мають критично важливі задачі. М'яка система реального часу зазвичай задовольняє обмеження відгуку реального часу. Прикладом типової м'якої системи реального часу є програвач мультимедіа. Програвач може іноді пропустити відеокадр або аудіозвук і користувач може це навіть не помітити.
У жорсткій системі реального часу новий результат виведення завжди повинен бути обчислений у зазначених границях часу або система не спрацює. Як приклад жорсткої системи реального часу розглянемо систему дистанційного керування кермом (тобто, керовану комп'ютером). У системі керування польотом літака, коли льотчик переміщає штурвал керування, рулі керування польотом повинні у відповідь переміститися дуже швидко або ж літак втратить стійкість і впаде. Щоб забезпечити безпеку FAA постійно перевіряє і сертифікує реакцію в реальному часі керованих комп'ютером симуляторів польоту і літаки.
Багато вбудованих систем є системами реального часу з декількома входами і виходами. Кілька подій відбуваються незалежно одна від одної. Програмування таких ситем спрощується при поділі задач, але це потребує від центрального процесора постійного переключення між різними задачами. Таке переключення та поділ часу процесора між декількома задачами зазвичай забезпечують багатозадачні операційні системи. Вони забезпечують також елементи синхронізації, необхідні для координації дій між різними задачами, що виконуються паралельно.

1. Які основні характеристики електронних систем?
2. На які рівні поділяють функціональні задачі в електронних системах?
3. У чому відмінність мікропроцесорної системи від системи на “жорсткій логіці”?
4. Які недоліки електронних систем на “жорсткій логіці”?
5. Узагальнена структурна схема ВК оптико-електронної системи.
6. Наведіть основні переваги КОЕС.
7. У чому відмінність каналу зв’язку від лінії зв’язку?
8. Які групи ознак найбільш часто використовують при класифікації ЕС?
9. Наведіть узагальнену структурну схему ВК КОЕС.
10. Що означає поняття “вбудована система”?
11. У чому специфіка електронних систем реального часу?