 | |
|
Автори:
Злепко С. М., Коваль Л. Г., Гаврілова Н. М., Тимчик І. С. |
|
Навчальний посібник |
2 УЛЬТРАЗВУКОВА ДІАГНОСТИЧНА АПАРАТУРА |

| |
(2.1) |
де с – швидкість розповсюдження ультразвукових хвиль в даному середовищі, м/с;
f – частота коливань, кГц.
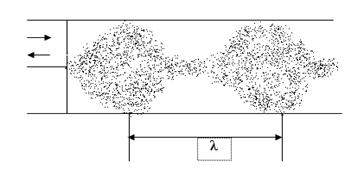
Швидкість, з якою частинки середовища коливаються навколо середнього положення, називається коливальною. Коливальна швидкість V визначається виразом:
 |
(2.2) |
де w - кутова частота, кГц;
А - амплітуда зміщення частинок середовища, м;
t - час, с;
х - відстань частинки, що коливається від джерела коливань, м;
с - швидкість розповсюдження коливань в середовищі, м/с;
 - фаза коливань.
- фаза коливань.
В енергетичному співвідношенні реальні коливальні системи характеризуються зміною енергії внаслідок часткової її затрати на роботу проти непотенціальних сил тертя і випромінювання в зовнішнє середовище. В пружному середовищі коливання постійно затухають. Для характеристики затухаючих коливань використовують коефіцієнт затухання (S), логарифмічний декремент (q) і добротність (Q).
Коефіцієнт затухання відображає швидкість зменшення амплітуди з плином часу. Якщо позначити час, протягом якого амплітуда зменшується в е=2,718 раза, через t, то:
| |
(2.3) |
Зменшення амплітуди за один цикл характеризується логарифмічним декрементом, рівним натуральному логарифму відношення двох амплітуд, що розділені періодом. Розв'язок такого рівняння показує, що логарифмічний декремент дорівнює відношенню періоду коливань до часу затухання:
| |
(2.4) |
Добротність системи – це величина, яка дорівнює числу повних коливань, що відповідають зменшенню амплітуди в е раз. Число періодів, що вкладається в цей проміжок часу, чи добротність Q, виражається формулою
 |
(2.5) |
Слід взяти до уваги, що добротність кварцової пластинки, що застосовується як випромінювач ультразвукових коливань, дорівнює 100000.
Користуючись поняттям добротності механічної системи, можна вивести формулу власної частоти затухаючих коливань:
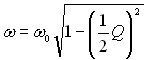 |
(2.6) |
Властивість середовища проводити акустичну енергію, в тому числі і ультразвукову, характеризується акустичним опором. Чисельно питомий акустичний опір Z знаходиться як добуток густини середовища r на швидкість с розповсюдження в ній ультразвукової хвилі:
| Z=r·с. | (2.7) |
Питомий акустичний опір вимірюється в Па·с/м (СІ).
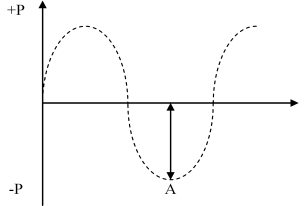
Максимальне значення змінного акустичного тиску (амплітуда тиску) може бути розраховано через амплітуду коливання частинок:
| Р=2pfrсА, | (2.8) |
де Р – максимальний акустичний тиск (амплітуда тиску), Па;
f – частота, кГц;
с – швидкість розповсюдження ультразвуку, м/с;
r – густина середовища, кг/м3.
В результаті дії пружних і інерційних сил виникає прискорення, що змінює напрямок протягом періоду. Амплітудне значення прискорення а визначається виразом:
| а=(2pf)2А. | (2.9) |
Біофізична дія ультразвуку тісно пов'язана зі змінним акустичним тиском, а особливо з силами, що розвиваються внаслідок великих прискорень частинок в досліджуваних тканинах.
Енергетичні параметри ультразвуку
Ультразвукова енергія є сумою кінетичної енергії коливальних частинок і потенційної енергії пружної деформації середовища, вимірюється в джоулях (Дж) (СІ). Акустична потужність являє собою енергію, що переноситься за одиницю часу через поверхню, перпендикулярну до напрямку розповсюдження звукової хвилі, вимірюється в ватах (Вт).
Розглянемо такий енергетичний параметр ультразвуку як інтенсивність, і визначається формулою:
| |
(2.10) |
де W - енергія потоку ультразвуку, що проходить через площину S за час t, Дж.
Інтенсивність ультразвуку пов'язана з коливальною швидкістю частинок середовища виразом:
 |
(2.11) |
де V – коливальна швидкість частинок середовища.
Інтенсивність ультразвуку вимірюється в Вт/м2 (СІ), але у фізіотерапії затвердилась розмірність Вт/см2.
В медицині прийнято виділяти три діапазони інтенсивностей:
1) 0,05-0,6 Вт/см2 – низький рівень інтенсивності;
2) 0,6-1,2 Вт/см2 – середній рівень інтенсивності;
3) вище 1,2 Вт/см2 – надтерапевтичний, високий рівень інтенсивності.
Механізм фізіологічної і лікувальної дії ультразвуку
В механізмі дії ультразвуку виключна роль належить впливу його на біоструктури, перш за все на воду. Чутливі до ультразвуку і білки. Під його впливом виникає конформаційний ефект, що викликається або розривом бічних зв'язків між ділянками поліпептидного ланцюга або зсувом гідратаційних і сольватаційних процесів. Під впливом ультразвуку відбувається конформаційна перебудова мембран, при цьому підвищується проникливість гістогематичних бар'єрів і здійснюється зсув рН в лужну сторону.
Взагалі при впливі ультразвуку на організм виникає ряд процесів, які в схематичному вигляді зображено на рис. 2.3.
Однією із основних вимог, що висуваються до ультразвукових діагностичних ехотомоскопів, є необхідність забезпечити високу якість ехозображення внутрішніх органів. Виконання цієї вимоги, насамперед, залежить від характеристик ультразвукового перетворювача, який випромінює і приймає акустичні коливання в області дослідження, а також перетворює акустичні коливання в електричні і навпаки. Для формування двовимірного ехозображення перетворювач повинен здійснювати сканування, тобто послідовне переміщення акустичного променя в області дослідження.
Особливістю роботи ультразвукового перетворювача в медичних діагностичних приладах є необхідність фокусування акустичного променя.
Методи динамічного фокусування МДФ (DF) основані на використанні багатоелементних решіток перетворювачів і потребують досить високого технологічного рівня для їх реалізації. Додаткових труднощів додають пристрої керування фокусуванням, які повинні забезпечувати роботу в реальному масштабі часу. Похибки виготовлення гратки, дискретність і помилки керування фокусуванням можуть призводити до спотворення форми променя і погіршення якості ехозображення.
В багатоелементних перетворювачах з електронним керуванням сканування, як правило, один і той же пристрій здійснює керування скануванням і фокусуванням, тому ці дві задачі доцільно розглядати разом.
В ультразвукових зондах з механічним скануванням задача фокусування вирішується незалежно на основі використання кільцевої гратки перетворювачів з електронним керуванням.
Характеристики акустичного поля перетворювача
Якість і точність формування ехозображень визначаються роздільною здатністю по глибині і поперечною роздільною здатністю, що залежить від характеристик полів випромінювання і прийому перетворювача. Поле випромінювання визначається тиском або інтенсивністю, що створюються перетворювачем у режимі випромінювання в довільній точці простору. Просторовий розподіл поля у відносних одиницях називається діаграмою випромінювання. Діаграма випромінювання за тиском являє собою залежність тиску випромінювання від координат точки, у якій визначається цей тиск. Як правило, розглядаються перерізи діаграми випромінювання площиною, що проходить через вісь випромінювача. При цьому будується залежність тиску від лінійної координати, вісь якої перпендикулярна до осі випромінювання. Слід зазначити, що в загальному випадку характер перерізу діаграми випромінювання залежить від глибини, тобто відстані від випромінювача до осі координат, вздовж якої розглядається зміна інтенсивності [14].
Іноді будується залежність тиску від кутової координати, і відлік починається від осі випромінювання. У цьому випадку прийнято говорити про діаграму спрямованості випромінювача. При досить великих глибинах, у так званій "далекій зоні" випромінювання, нормована діаграма спрямованості не залежить від глибини.
Рисунок 2.3 – Схема взаємодії ультраакустичної енергії з біологічним середовищем і реакції організму
Центральна частина діаграми випромінювання, в межах якої зосереджена основна енергія випромінювання, називається головним променем чи основною пелюсткою. На практиці за нижнє значення тиску випромінювання, що визначає ширину діаграми, беруть рівень (-10) чи
(-20) дБ від максимального значення. Іноді говорять про ширину діаграми за рівнем половинної потужності (-6 дБ). У ряді випадків, коли має місце зменшення рівня до 0, як оцінки ширини основної пелюстки використовують відстань між найближчими до максимуму нулями.
Крім основної пелюстки діаграма може мати бічні пелюстки, відносний рівень яких визначає небажане бічне випромінювання.
В тому випадку, коли випромінювання є неперервним, діаграма випромінювання постійна в часі. При імпульсному випромінюванні діаграма є функцією часу, досягаючи максимального значення в даній точці простору до часу приходу в цю точку максимуму імпульсу випромінювання.
Поле прийому визначається тиском чи інтенсивністю, що виникають на поверхні приймального перетворювача в результаті впливу на нього ультразвукового випромінювання, зокрема, розсіяного випромінювання, створюваного сукупністю відбивачів внаслідок опромінення зондувальним сигналом. Природно характеризувати приймальні можливості перетворювача за допомогою діаграми на прийом, яка визначається як результат впливу на приймальний перетворювач точкового випромінювача, що переміщується в просторі. Так само, як у випадку діаграми випромінювання, звичайно розглядаються перерізи приймальної діаграми площиною, що проходить через вісь (напрямок) прийому. Усе вищесказане про діаграми випромінювання поширюється і на приймальні діаграми.
В режимі випромінювання-прийому просторова вибірковість системи характеризується добутком діаграм випромінювання і прийому.
В загальному випадку, коли маємо випромінювальний перетворювач чи систему перетворювачів з амплітудним розподілом тиску на розвороті (апертурі) Р (u,v), просторове поле випромінювання для амплітуди неперервного синусоїдального сигналу може бути знайдене за допомогою інтегрального перетворення Гріна [14]:
| |
(2.12) |
де К - нормувальний множник;
 - хвильовий коефіцієнт (λ – довжина хвилі в середовищі,
- хвильовий коефіцієнт (λ – довжина хвилі в середовищі,
що відповідає частоті випромінювання ω0);
R - радіус-вектор, що визначає положення точки А в просторі, для якої обчислюється поле випромінювання;
ruv - радіус-вектор, що визначає положення елементарного випромінювача площею dudv на поверхні перетворювача (рис. 2.4);
S – площа інтегрування, що збігається з площею випромінювача.
Для того, щоб врахувати залежність характеристик поля від часу, використовується вираз, що описує просторово-часове поле випромінювання синусоїдального сигналу (рис. 2.5):
 |
(2.13) |
![]()
Для імпульсного сигналу з комплексною обвідною U(t) цей інтеграл має вигляд
 |
(2.14) |
Наведені інтегральні співвідношення отримані при умовах, що напрямок випромінювання збігається з напрямком осі Z, розміри випромінювача істотно більші за довжину хвилі випромінювання, поле випромінювання обчислюється на порівняно невеликих кутових відстанях від осі Z, при цьому на глибинах, що перевищують розмір апертури.
Фокусовані випромінювачі
Як випливає із результатів аналізування поля випромінювання плоских випромінювачів, на інтервалі глибин від площини випромінювача до фокуса ширина основної пелюстки значно більша за її ширину в фокусі. Для типових значень діаметра круглої апертури 2а=13мм і частоти f0=3,5 МГц фокусна відстань  мм. Цей інтервал складає суттєву частину максимальної глибини зондування 180...240 мм, що прийнята для частоти 3,5 МГц. Тому для підвищення роздільної здатності в поперечному напрямку на малих глибинах необхідно використовувати різні способи фокусування випромінювачів.
мм. Цей інтервал складає суттєву частину максимальної глибини зондування 180...240 мм, що прийнята для частоти 3,5 МГц. Тому для підвищення роздільної здатності в поперечному напрямку на малих глибинах необхідно використовувати різні способи фокусування випромінювачів.
На рис. 2.7 схематично зображені типи випромінювачів, які найбільш часто використовуються.
Перші шість типів фокусувальних випромінювачів мають фіксовану фокусну відстань. Останні чотири типи випромінювачів дозволяють забезпечити зміну фокусної відстані за допомогою спеціальних електронних схем керування фокусуванням.
Характеристики поля випромінювання для сфокусованих випромінювачів доцільно досліджувати на прикладі перетворювача сферичної форми, оскільки основні співвідношення, що визначають ці характеристики, є спільними для всіх типів фокусувальних випромінювачів.
На рис. 2.6 та 2.8 наведені перерізи поля випромінювання сферичних випромінювачів з діаметром 2а і різним нормованим радіусом сфери (Rc – радіус кривизни сфери): А=0,53 (рис. 2.7) та А=0,27 (рис. 2.8). Поля розраховувалися тим же методом математичного моделювання, що і розглянуті вище поля плоских випромінювачів, для діаметра 2а=15 мм, частоти f0=2 МГц і кількості періодів імпульсів n=2. Перерізи подані для рівнів –3; –6; –10 дБ.
При збільшенні радіуса кривизни фокусна відстань і максимум інтенсивності на осі випромінювання віддаляється від випромінювача і наближається до точки а2/?. Кутова ширина головної пелюстки в зонах фокуса для кожного радіуса кривизни випромінювача близька до величини, що визначається співвідношенням
 |
(2.15) |
де коефіцієнт К залежить від рівня (відносно максимуму), за яким визначається ширина головної пелюстки. Так, для рівня половинної потужності (-6 дБ) величина К?1,12, а для рівня, що відповідає першим нулям діаграми направленості, К?1,22, так само, як для плоского випромінювача.
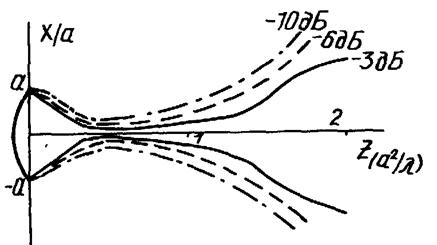
Рисунок 2.6 – Поле випромінювання круглого сферичного випромінювача з відносним радіусом кривизни А=0,53
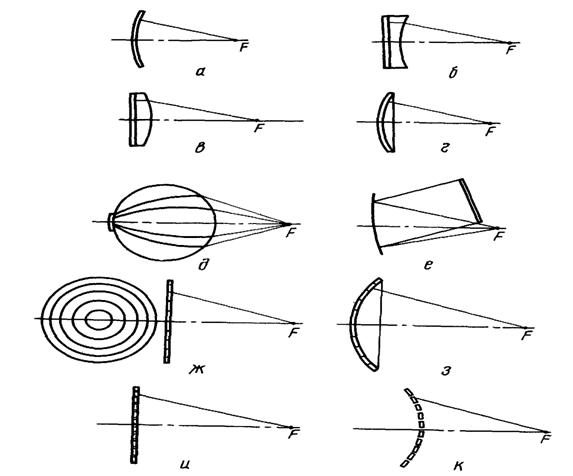
Рисунок 2.7 – Типи фокусувальних випромінювачів:
а – перетворювач сферичної форми; б – плоский перетворювач з плоско-ввігнутою "прискорювальною" лінзою з матеріалу зі швидкістю звуку, що перевищує швидкість звуку в середовищі розповсюдження; в – плоский перетворювач з плоско-випуклою "уповільнювальною" лінзою з матеріалу зі швидкістю звуку, що менша швидкості звуку в середовищі розповсюдження; г – сполучення перетворювачів ввігнутої форми з одним із типів лінз; д – перетворювач з неоднорідною лінзою, в якій показник заломлення матеріалу змінюється за певним законом (наприклад, лінза Люнеберга); е– перетворювач із дзеркальним відбивачем; ж – плоска кільцева антенна гратка (annular array), в якій кожне із концентричних кілець збуджується незалежно з певною затримкою для того, щоб сформувати фронт хвилі потрібної форми;
и – сферична кільцева антенна гратка; к – лінійна антенна гратка; л – випукла (конвексна) антенна гратка.
Таким чином сімейство перерізів головної пелюстки поля випромінювання (за певним рівнем) для круглих випромінювачів одного діаметра, але сфокусованих на різні глибини, має обвідну у вигляді конічної поверхні з кутом при вершині.
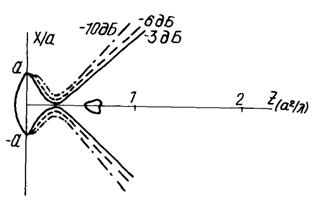
Рисунок 2.8 – Поле випромінювання круглого сферичного випромінювача з радіусом кривизни А=0,27
Кільцеві антенні гратки
Для суттєвого збільшення розміру зони фокусування круглих випромінювачів використовується кільцева антенна гратка з незалежним збудженням кожного з концентричних кілець зондувальними імпульсами (рис. 2.9). Зондувальні імпульси за допомогою спеціальної схеми керування подаються на кільця з такими взаємними затримками, що збуджувані ними акустичні імпульси утворюють фронт випромінювання, близький до сферичного, для отримання фокуса випромінювання в точці F. Радіуси кілець, як правило, вибираються таким чином, щоб площі кожного з них (за виключенням зазорів між кільцями) були близькі один до одного. Нееквідистантність ширини кілець дозволяє дещо зменшити рівень бокових пелюсток, які виникають внаслідок змін апертури.
На рис. 2.9 показана кільцева гратка з п'яти кілець, на які подаються імпульси з обвідними, зсунутими один відносно одного, щоб сформувати сферичний фронт випромінюючої хвилі. Залежно від зміни радіуса цього сферичного фронту змінюється положення фокуса F по глибині, а також положення зони фокусування [14].
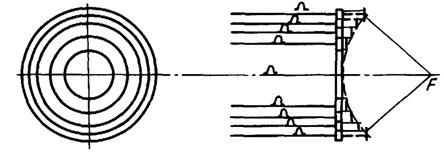
Рисунок 2.9 – Кільцева антенна гратка
В режимі випромінювання встановлюється те положення фокуса, яке потрібне для забезпечення найкращої роздільної здатності в заданому інтервалі глибин.
В режимі прийому використовується динамічне фокусування, при якому в процесі прийому ехосигналів із збільшенням глибини, на якій знаходяться відбивальні структури, здійснюється переключення фокуса для того, щоб отримати хорошу поперечну пропускну здатність на потрібному діапазоні глибин.
Типи граток і способи сканування
Некогерентна гратка НГ (IG) з окремим скануванням РС (SC). В некогерентній гратці кожен елемент здійснює сканування заданої області окремо від інших, після чого інформація, яка отримана елементами, об'єднується. Метод сканування кожного елемента – механічний чи електронний. В останньому випадку кожний з елементів сам є граткою. Об'єднання інформації реалізується шляхом використання відомих алгоритмів відбору максимального значення сигналу для кожної точки досліджуваної області чи додавання (з відповідними масами) сигналів від елементів гратки в кожній точці. Така некогерентна обробка сигналів при різниці ракурсів спостереження дозволяє покращити кутову пропускну здатність порівняно з одним елементом і покращити можливість спостереження внутрішніх структур за рахунок того, що межі цих структур краще спостерігаються тими елементами, вісь випромінювання яких направлена перпендикулярно до межі (рис. 2.10).
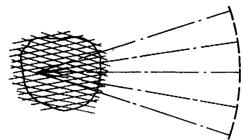
Рисунок 2.10 – Некогерентна гратка з окремим скануванням
В відомих системах з некогерентними гратками використовується механічне сканування елементів, заглиблених в акустично прозору рідину, тому такі системи називаються імерсійними. В системі "Octoson" фірми Ausonics (Австралія) є вісім окремих сканувальних випромінювачів, кожен з апертурою діаметром приблизно 10 см, що дозволяє отримати хорошу кутову пропускну здатність і високу чутливість.
Час отримання кадру зображення n елементами дорівнює
| |
(2.16) |
де m – число акустичних рядків;
zм – максимальна відстань від випромінювача до задньої межі області огляду.
При m=100, zм = 40 см і С = 1540 м/с час отримання кадру в 8-елементній системі ТК = 0,4 с. Звичайно в некогерентній системі важко спостерігати структури, що рухаються. І навіть дихання в ряді випадків може погіршувати зображення, що спонукає обмежувати кількість елементів в гратці для зменшення часу отримання кадру.
Лінійно-сканувальні гратки
Гратки цього типу складаються з N елементів, розміщених на одній осі. Для отримання зображення в кожному зондуванні діаграма направленості ДН (diagram of orientation) формується тільки частиною елементів, що дорівнює n [14].
Типові параметри лінійно-сканувальних граток: число комутувальних елементів 64...256; число елементів, які формують ДН, 4...16; крок гратки (залежно від частоти) 0,2...0,4 мм; загальна довжина апертури 45...120 мм; зазор між елементами 0,05...0,09 мм.
Сканування в гратці проводиться шляхом переключення елементів. Для отримання інформації в одному напрямку (по одному акустичному рядку) збуджувальні імпульси подаються на підгратку з n елементів, після чого ці ж n елеменів переключаються на прийом. В результаті формується діаграма випромінювання, яка показана штрих-пунктирною лінією на рис. 2.11, поз.1, діаграма на прийом (штрихова лінія) і результувальна діаграма, яка дорівнює перетворенню приймальної і передавальної діаграм (зображена суцільною лінією). При необхідності в процесі прийому може використовуватися режим динамічного фокусування. Напрямок акустичного рядка, як правило, перпендикулярний до осі розміщення елементів.
Для отримання наступного акустичного рядка відключається один з елементів на початку підгратки з n елементів і підключається додатково елемент в кінці, тобто вся підгратка пересувається в просторі на величину, яка дорівнює кроку гратки d. Відповідно на крок переміщається в просторі паралельно попередньому напрямку акустичний рядок (рис. 2.11, поз. 2). В тому випадку, коли потрібно перемістити акустичний рядок на половину кроку гратки, то на випромінювання підключаються перші n елементів (як в поз. 1), а на прийом гратка переміщається на крок. Положення діаграм на прийом і передачу, а також результувальної діаграми показані на рис. 2.11, поз.3. Меншу дискретність переміщення акустичного рядка можна отримати, якщо при формуванні гратки на прийом елемент на початку не відключається, а елемент в кінці підключається, так що приймальна апертура складається з (n+1) елементів. В результаті забезпечується переміщення акустичного рядка на чверть кроку гратки (рис. 2.11, поз. 4) [14].
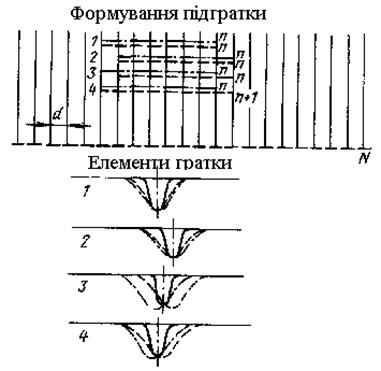
Рисунок 2.11 – Комутація елементів при скануванні в лінійній гратці
На рис. 2.12 показана схема пристрою керування скануванням лінійної гратки ЛГ (LG).
Комутатор n з N забезпечує підключення як на передачу, так і на прийом елементів гратки в необхідній кількості. В режимі передачі ці елементи збуджуються сигналами від генераторів, які запускаються з потрібними взаємними затримками за сигналами від контролера керування скануванням. В режимі прийому ехосигнали надходять на попередні підсилювачі і після підсилення – на комутувальні лінії затримки, які також керуються контролером. З виходу ліній затримки сигнали додаються і подаються в приймач.
Випукла (конвексна) гратка
Випукла гратка (protuberant grate) відрізняється від лінійної тим, що елементи розміщуються на поверхні, яка являє собою частину циліндра. В ній так само, як і в лінійній гратці, діаграма несправності ДН (FF) формується тільки частиною елементів і сканування здійснюється переключенням групи елементів. Осі формувальних променів вже не паралельні один відносно одного. Розходячись в площині сканування (рис. 2.13), вони утворюють віяло променів. Глибина перетину сусідніх променів тим більша, чим менший радіус кривизни поверхні гратки. Тому для випуклої гратки більш важливо, ніж для лінійної, зменшувати дискретність переключення променя чи використовувати підкачку променя.
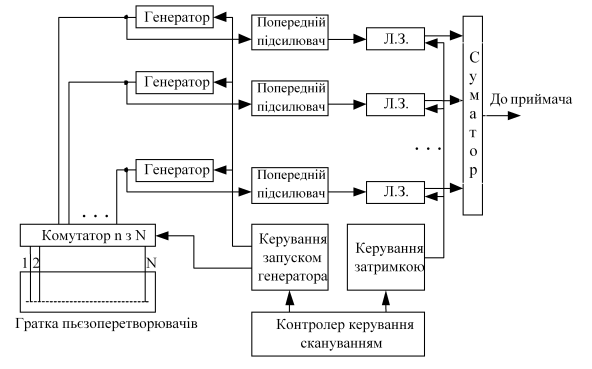
Рисунок 2.12 – Пристрій керування скануванням

Рисунок 2.13 – Конвексна гратка
Схема керування скануванням випуклої гратки аналогічна схемі керування лінійної гратки. Випукла гратка поєднує перевагу лінійного сканування – широка зона огляду структур, близько розташованих до поверхні зонда, і перевагу секторного сканування – широка зона огляду глибоко розташованих структур.
З цієї причини випуклі гратки знаходять все більш широке застосування в сучасних ехотомоскопах, не дивлячись на більшу складність у виготовленні, керуванні скануванням і фокусуванням, ніж лінійні гратки.
Методи ультразвукової ехо-імпульсної візуалізації знайшли широке застосування в медицині, хоча закладені в їх основу наукові принципи поки що не до кінця зрозумілі. Існуючі ехосистеми нараховують багато видів. Досить умовно можна уявити, що всі вони складаються з шести основних взаємопов'язаних частин відповідно до рис. 2.14.
Рисунок 2.14 – Блок-схема, що показує зв'язок між основними вузлами ехо-імпульсних діагностичних систем
Рисунок 2.15 – Апарат для УЗ діагностики ALOKA SSD-2000 (АЛОКА)
| ЗМІСТ |
