
10.4 Гладка оптимізація
У випадку, коли функція цілі ![]() і функції
і функції ![]() , які задають обмеження, є диференційними (гладкими), для розв’язання задач оптимізації використовується поняття градієнта. Для будь-якої функції
, які задають обмеження, є диференційними (гладкими), для розв’язання задач оптимізації використовується поняття градієнта. Для будь-якої функції ![]() , що диференціюється, її градієнтом
, що диференціюється, її градієнтом ![]() в точці
в точці ![]() називається вектор
називається вектор
 .
.
Вектор градієнта ![]() задає (в даній точці
задає (в даній точці ![]() ) напрям найшвидшого росту функції
) напрям найшвидшого росту функції ![]() , а зворотний йому напрям
, а зворотний йому напрям ![]() , що називається антиградієнтом, напрям найшвидшого спадання цієї функції. Точки, в яких градієнт функції перетворюється в нуль, називаються її стаціонарними точками. Якщо екстремум функції
, що називається антиградієнтом, напрям найшвидшого спадання цієї функції. Точки, в яких градієнт функції перетворюється в нуль, називаються її стаціонарними точками. Якщо екстремум функції ![]() досягається всередині припустимої області (не на її межі), то в точці оптимуму
досягається всередині припустимої області (не на її межі), то в точці оптимуму ![]() її градієнт перетворюється в нуль, тобто має місце система рівнянь
її градієнт перетворюється в нуль, тобто має місце система рівнянь
![]()
Ці рівняння (умови стаціонарності функцій) мають місце не тільки для абсолютних, але й для локальних екстремумів. Разом з тим умови стаціонарності не є достатніми.
10.4.1 Умови Куна-Таккера
У випадку, коли екстремальна точка ![]() лежить на межі припустимої множини, вона не обов’язково є стаціонарною. Але за деякої додаткової умови може, якщо замінити цільову функцію
лежить на межі припустимої множини, вона не обов’язково є стаціонарною. Але за деякої додаткової умови може, якщо замінити цільову функцію ![]() так званою функцією Лагранжа
так званою функцією Лагранжа ![]() (де
(де ![]() – ліві частини всіх граничних умов), дістати того, щоб граничні екстремальні точки функції
– ліві частини всіх граничних умов), дістати того, щоб граничні екстремальні точки функції ![]() були стаціонарними точками функції Лагранжа
були стаціонарними точками функції Лагранжа ![]() при відповідних значеннях параметрів
при відповідних значеннях параметрів ![]() .
.
Умова, про яку йдеться, є так званою умовою регулярності – виконується на практиці. Вона полягає в лінійній незалежності в даній точці ![]() градієнтів всіх мережних функцій
градієнтів всіх мережних функцій ![]() , для яких
, для яких ![]() .
.
При виконанні цієї умови для будь-якої точки максимуму ![]() в задачі “знайти mах
в задачі “знайти mах ![]() при
при ![]() ,
, ![]() ” і для будь-якої точки мінімуму
” і для будь-якої точки мінімуму ![]() в задачі “знайти min
в задачі “знайти min ![]() при
при ![]() ,
, ![]() ” повинні виконуватися такі три умови, які називаються умовами Куна-Таккера:
” повинні виконуватися такі три умови, які називаються умовами Куна-Таккера:
1) ![]() лежить в припустимій множині;
лежить в припустимій множині;
2) ![]() при
при ![]() ;
;
3) ![]() .
.
де ![]() – деякі дійсні числа (множники Лагранжа), довільні для всіх умов типу рівності
– деякі дійсні числа (множники Лагранжа), довільні для всіх умов типу рівності ![]() і невід’ємні для всіх умов типу нерівності
і невід’ємні для всіх умов типу нерівності ![]() .
.
10.4.2 Чисельні методи гладкої оптимізації
Метод оптимізації, який використовує умови Куна-Таккера, на практиці застосовується відносно рідко через велику складність аналізу системи співвідношень, що виникає. Найчастіше застосовуються чисельні методи оптимізації, для яких достатньо вміти знаходити чисельні значення градієнта в будь-якій заданій точці.
Загальна ідея методу градієнтного спуску (підйому)
Нехай неперервно диференційована цільова функція ![]() задана в усіх точках простору
задана в усіх точках простору ![]() . Вирішуючи від точки
. Вирішуючи від точки ![]() на дуже малий крок
на дуже малий крок ![]() в будь-якому напрямку
в будь-якому напрямку ![]() , де
, де ![]() – одиничний вектор, в силу умови диференційованості функції
– одиничний вектор, в силу умови диференційованості функції ![]() , одержимо нерівності:
, одержимо нерівності:
![]()
Це означає, що рух (на дуже малий крок) в напрямку градієнта функції забезпечує найбільший підйом, а в напрямку антиградієнта – найбільше спадання цієї функції. Ці напрямки називають відповідно напрямком найшвидшого підйому і найшвидшого спуску функції ![]() в даній точці
в даній точці ![]() .
.
Виходячи з заданої точки ![]() , будуємо послідовність точок
, будуємо послідовність точок ![]() так, що переміщення від кожної точки
так, що переміщення від кожної точки ![]() до наступної точки
до наступної точки ![]() проводиться в напрямку найшвидшого підйому (при пошуку максимуму) або найшвидшого спуску (при пошуку мінімуму).
проводиться в напрямку найшвидшого підйому (при пошуку максимуму) або найшвидшого спуску (при пошуку мінімуму).
Важкість практичного застосування такої процедури полягає перш за все у виборі величини кроку ![]() при переході від точки
при переході від точки ![]() до точки
до точки ![]() . Справа в тім, що нерівності мають місце лише в малому околі точки
. Справа в тім, що нерівності мають місце лише в малому околі точки ![]() , тобто для малої величини кроку
, тобто для малої величини кроку ![]() . При великому значенні кроку можна, прямуючи в напрямку найшвидшого підйому, одержати не збільшення, а зменшення значення цільової функції
. При великому значенні кроку можна, прямуючи в напрямку найшвидшого підйому, одержати не збільшення, а зменшення значення цільової функції ![]() . Те ж саме має місце і для процедури спуску.
. Те ж саме має місце і для процедури спуску.
Отже, величину кроку ![]() в процедурах найшвидшого підйому і спуску необхідно вибирати достатньо малою. Проте при прямуванні малими кроками для наближення до екстремальної точки може знадобитись дуже велика кількість кроків. Крім того, від процедур підйому і спуску звичайно потребується не просто наближення до екстремальної точки
в процедурах найшвидшого підйому і спуску необхідно вибирати достатньо малою. Проте при прямуванні малими кроками для наближення до екстремальної точки може знадобитись дуже велика кількість кроків. Крім того, від процедур підйому і спуску звичайно потребується не просто наближення до екстремальної точки ![]() , а збіжність до неї. Це означає, що зі збільшенням кількості кроків
, а збіжність до неї. Це означає, що зі збільшенням кількості кроків ![]() відстань
відстань ![]() від точки
від точки ![]() до точки екстремуму
до точки екстремуму ![]() повинна наближатися до нуля. Це можливо лише в тому випадку, якщо з наближенням до точки екстремуму величина кроку
повинна наближатися до нуля. Це можливо лише в тому випадку, якщо з наближенням до точки екстремуму величина кроку ![]() буде наближатись до нуля. На рисунку 5.2 наведений алгоритм пошуку екстремуму функції за методом градієнтного спуску.
буде наближатись до нуля. На рисунку 5.2 наведений алгоритм пошуку екстремуму функції за методом градієнтного спуску.
Пропорційно - градієнтний метод
Найбільш простим способом забезпечення необхідного зменшення кроку при наближенні до точки екстремуму для диференціальної функції ![]() є вибір довжини кроку
є вибір довжини кроку ![]() пропорційним довжині вектора градієнта в точці
пропорційним довжині вектора градієнта в точці ![]() :
:
![]()
Такий вибір кроку означає, що перехід від точки ![]() до точки
до точки ![]() буде виконуватись за формулою
буде виконуватись за формулою ![]() для процедури підйому (знаходження максимуму функції
для процедури підйому (знаходження максимуму функції ![]() ) і за формулою
) і за формулою ![]() для процедури спуску (знаходження мінімуму функції
для процедури спуску (знаходження мінімуму функції ![]() ).
).
Повнокроковий градієнтний метод
В цьому методі кожний крок градієнтного підйому або спуску виконується максимально можливої довжини, яка забезпечує необхідний напрямок зміни значення функції (тобто її збільшення або зменшення). Інакше кажучи, на напівпрямій, що виходить з чергової точки ![]() в напрямку градієнта (при підйомі) або антиградієнта (при спусканні) відшукується точка абсолютного максимуму або мінімуму, яка і вибирається як наступна точка
в напрямку градієнта (при підйомі) або антиградієнта (при спусканні) відшукується точка абсолютного максимуму або мінімуму, яка і вибирається як наступна точка ![]() .
.
В випадку довільної диференціальної функції ![]() розв’язання подібної задачі, що її називають одновимірною оптимізаційною задачею, спрощується при накладанні на функцію
розв’язання подібної задачі, що її називають одновимірною оптимізаційною задачею, спрощується при накладанні на функцію ![]() деяких додаткових вимог, наприклад, опуклості.
деяких додаткових вимог, наприклад, опуклості.
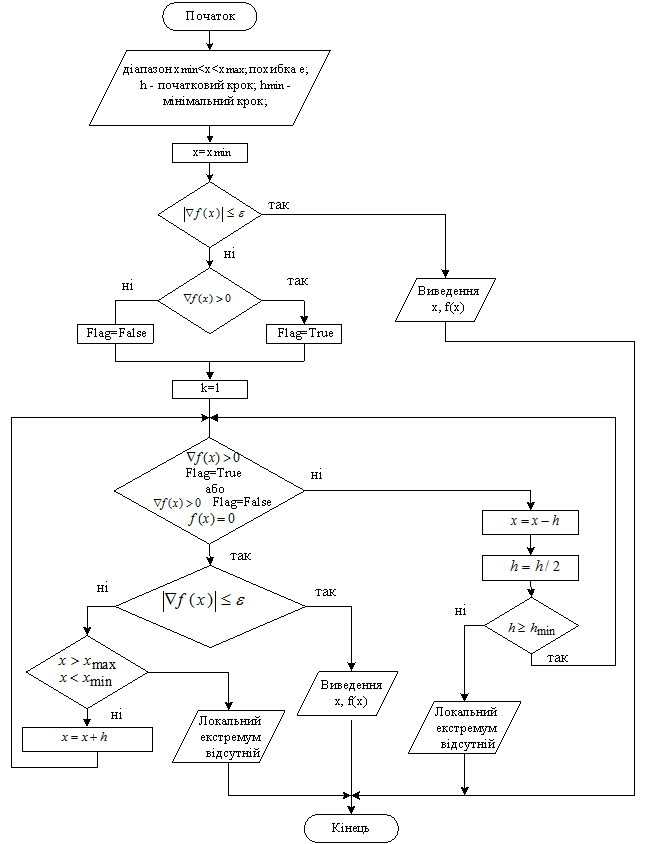
Рисунок 5.2 – Алгоритм методу градієнтного спуску (підйому)
Метод спряжених градієнтів
Для випадку, коли функція ![]() – квадратний поліном, розроблена точна процедура, при повних кроках якої точки екстремуму досягаються з будь-якої початкової точки
– квадратний поліном, розроблена точна процедура, при повних кроках якої точки екстремуму досягаються з будь-якої початкової точки ![]() за
за ![]() кроків (де
кроків (де ![]() – розмірність простору). Напрямок
– розмірність простору). Напрямок ![]() кроку від точки
кроку від точки ![]() до точки
до точки ![]() задається в цьому методі такою рекурентною формулою:
задається в цьому методі такою рекурентною формулою:

де ![]() означає довжину вектора
означає довжину вектора ![]() .
.
Знак плюс вибирається в тому випадку, коли розглядається задача максимізації, а знак мінус – у випадку розв’язання задачі мінімізації. Такий же вибір знака здійснюється і для напрямку ![]() першого кроку
першого кроку ![]() . Воно збігається з напрямком
. Воно збігається з напрямком ![]()
10.4.3 Методи зведення загальної задачі оптимізації до задачі без обмежень
Чисельні методи гладкої оптимізації, які описані вище, в чистому вигляді застосовуються звичайно для задач без обмежень. Задачі загального вигляду (тобто задачі з обмеженнями) зводять до задач без обмежень за рахунок зміни цільової функції. Нехай, наприклад, потрібно знайти максимум функції ![]() при обмеженнях
при обмеженнях ![]() В так званому методі штрафних функцій будується функція
В так званому методі штрафних функцій будується функція ![]() , яку називають штрафною функцією, і яка всередині припустимої області
, яку називають штрафною функцією, і яка всередині припустимої області ![]() приймає нульове значення, а поза нею – від’ємне. Найчастіше в якості такої функції вибирають функцію вигляду
приймає нульове значення, а поза нею – від’ємне. Найчастіше в якості такої функції вибирають функцію вигляду
![]() ,
,
після чого будують послідовність додатних чисел ![]() яка збігається до нуля.
яка збігається до нуля.
При заміні цільової функції ![]() функцією
функцією
![]()
розв’язують задачу без обмежень для цієї функції, починаючи з ![]() . Якщо розв’язок
. Якщо розв’язок ![]() належить припустимій області, тобто якщо всі
належить припустимій області, тобто якщо всі ![]() , то
, то ![]() є розв’язком початкової задачі з обмеженням. В протилежному випадку замінюють
є розв’язком початкової задачі з обмеженням. В протилежному випадку замінюють ![]() на
на ![]() і розв’язують задачу для нової цільової функції
і розв’язують задачу для нової цільової функції ![]() .
.
Алгоритм розв’язання такої задачі наведений на рисунку 5.3.
В методі бар’єрів при розв’язанні задачі max ![]() при
при ![]() цільову функцію
цільову функцію ![]() замінюють функцією
замінюють функцією ![]() , де бар’єрна функція
, де бар’єрна функція ![]() характеризується властивістю прямувати до
характеризується властивістю прямувати до ![]() при наближенні до границі припустимої області
при наближенні до границі припустимої області ![]() зсередини. Таку функцію можна задати, наприклад, формулою:
зсередини. Таку функцію можна задати, наприклад, формулою:
![]() ,
,
якщо область ![]() задана нерівностями
задана нерівностями ![]() .
.
Таким же чином, як і в методі штрафних функцій, вибирають послідовність ![]() додатних чисел
додатних чисел ![]() яка збігається до нуля. Розв’язуються задачі без обмежень для цільових функцій
яка збігається до нуля. Розв’язуються задачі без обмежень для цільових функцій ![]() при
при ![]()
Якщо при цьому використовується той або інший чисельний метод, в якому початкова точка вибирається всередині ![]() то наявність бар’єра забезпечить належність екстремальної точки
то наявність бар’єра забезпечить належність екстремальної точки ![]() (при її існуванні) області
(при її існуванні) області ![]() Наявність екстремуму забезпечується умовами обмеженості в області
Наявність екстремуму забезпечується умовами обмеженості в області ![]() і неперервності функцій
і неперервності функцій ![]() і
і ![]() .
.