|
|
||
|
|
3.1 Приклад виконання завдання
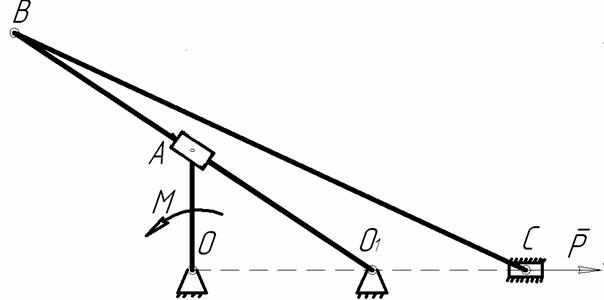
Дано: М= 6 Нм ; ОА= 0,15 м; ОО1=0,2 м ; О1В=0,5м ; ВС = 0,78 м
(рис. АМ3.6). Нехтуючи тертям, визначити
величину Р, яку необхідно прикласти до повзуна С, щоб механізм
знаходився в рівновазі, коли ОА
Рисунок АМ3.6
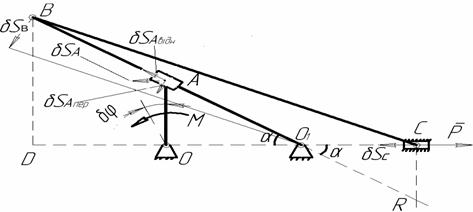
Розв’язання. Конструкція знаходиться в рівновазі під дією пари сил М і сили Р. В’язі, які діють на неї, допускають переміщення повзуна С на δSС, кривошипа ОА – на δφ. Знайдемо залежність між можливими переміщеннями точок системи. За рахунок шарнірного з’єднання з кривошипом ОА трубка (точка) А переміщується на δSА_ - абсолютне переміщення, одночасно переміщується по стержню ВО1 на δSАвідн. - відносне переміщення і зі стержнем ВО1 на δSАпер. - відносне переміщення (рис. АМ3.7).
Рисунок АМ3.7
Визначимо можливе переміщення δSС через переміщення кривошипа δφ. Для цього необхідно знайти переміщення вузла (точки) В – δSВ шатуна ВС. На рис. АМ3.7 позначимо кут ОО1В через a. Оскільки точка В теж належить коромислу ВО1, то знайдемо залежність δSВ через δSA пер.
δSAпер QUOTE
Відстань AO1=
Оскільки О1В= 50 см = 0,5 м , а АО1 = 0,25 м , то переміщення
δSВ= 2 δSAпер = 2δSAsinα =
Для визначення залежності між можливими переміщеннями δSВ і δSС знайдемо положення миттєвого центра обертання ланки ВС – точка R.
Тоді QUOTE
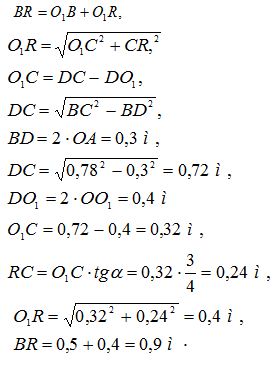
Визначаємо ВR і CR . Для цього розглянемо трикутники DBO1 , DBC1 і DRO1 .
З ∆DBO1 ð BD = 2 АО= 0,3 м.
З ∆DBС
ð
DC = QUOTE
Тоді О1С = DC – DO1 = 0,72 – 0,4 = 0,32 (м).
З ∆ СO1R
ð
CR = O1C· tga
= 0,32· QUOTE
О1R = QUOTE
Тоді δSС = 1,2 δSA
QUOTE
Рівняння робіт, яке виражає принцип можливих переміщень, має вигляд:
М δφ – Р δSС = 0, (3.1)
або 6 ·δφ – 0,048·Р ·δφ = 0.
Звідки Р = QUOTE
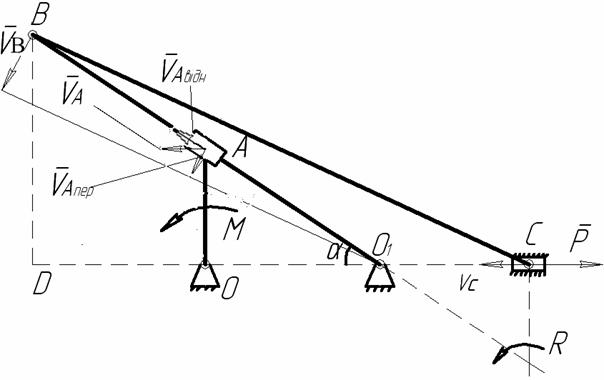
Розглянемо розв'язання задачі з врахуванням того, що сума потужностей сил, які діють на механічну систему у випадку рівноваги дорівнює нулю. Надаємо кривошипу ОА можливу кутову швидкість w (рис. АМ3.8) . Тоді вузлові точки А, В і С ланок механізму набувають відповідно швидкість VA, VB і VC. На рис. АМ3.8 покажемо напрям швидкостей вузлових точок механізму, застосовуючи поняття миттєвого центра швидкостей для кожної його ланки (точка А-миттєвий центр швидкостей (МЦШ) для ланки ОА, О1 – МЦШ для ланки О1В, R- МЦШ для ланки ВС). Запишимо рівняння потужностей: Mω- РVc = 0. (3.2) Оскільки повзун А звершує складний рух , то абсолютна швидкість VA дорівнює сумі переносної швидкості VАпер і відносної швидкості VАвідн (рис. АМ3.8).
Рисунок АМ3.8
З
попередніх розрахунків маємо: sina
=
Для визначення кутової швидкості ланки
В результаті маємо, що кутова швидкість ланки
Тоді швидкість точки С
Vc =ω QUOTE
Кутова швидкість кривошипа ОА :
QUOTE
Підставимо значення ω і VC в формулу ( 3.2), маємо:
М · Звідки Р = 125 (Н).
|
|
|
|
||