|
ТЕОРЕТИЧНА ТА ПРИКЛАДНА МЕХАНІКА
|
|
|
ТЕОРЕТИЧНА ТА ПРИКЛАДНА МЕХАНІКА
|
2 ПЛОСКА СИСТЕМА СИЛ
2.1 Теоретичні відомості і методичні вказівки
У теоретичній механіці одним із основних є поняття сили. У механіці під силою розуміють міру механічної взаємодії матеріальних тіл, у результаті якої тіла, що взаємодіють, можуть надавати одне одному прискорення або деформуватися (змінювати свою форму). Із цього означення випливають два методи вимірювання сили:
1. Динамічний, в основі якого лежить вимірювання прискорення тіла в інерціальній системі відліку;
2. Статичний, побудований на вимірюванні деформації пружних тіл.
Те, що в основу механіки було покладено кількісні закони сил, дозволило І. Ньютону відкрити закони руху тіл, не вивчаючи фізичних явищ, які виникають при взаємодії тіл. Більш того, в деяких випадках можна встановити кількісний зв’язок між механічними і немеханічними формами матерії при їх взаємних перетвореннях.
Модель сили визначається трьома головними умовами: величиною, напрямом дії і точкою прикладення.
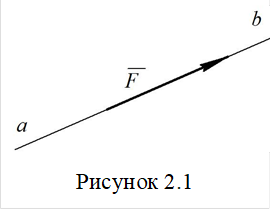 Такому означенню сили повністю відповідає поняття вектора, довжина якого у вибраному масштабі дорівнює величині (модуля) сили, прикладеної в даній точці. Вектор напрямлений в бік дії сили. Силу позначимо символом
Такому означенню сили повністю відповідає поняття вектора, довжина якого у вибраному масштабі дорівнює величині (модуля) сили, прикладеної в даній точці. Вектор напрямлений в бік дії сили. Силу позначимо символом ![]() (рис. 2.1).
(рис. 2.1).
Пряму ![]() , на якій відкладено відрізок, що зображує силу, називають лінією дії сили.
, на якій відкладено відрізок, що зображує силу, називають лінією дії сили.
Для вимірювання модуля сили її порівнюють з іншою силою, яку вважають еталоном. У системі СІ за одиницю сили (еталон) прийнято Ньютон (![]() ). Використовуються також більші одиниці вимірювання сил: кілоньютон (
). Використовуються також більші одиниці вимірювання сил: кілоньютон (![]() ); меганьютон (
); меганьютон (![]() ).
).
Сила, як векторна величина, підпорядкована всім законам векторного числення: додавання; віднімання; векторного та скалярного множення.
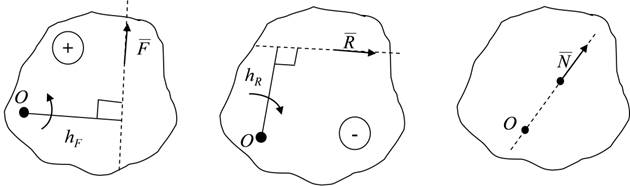
Алгебраїчним моментом сили відносно точки називається взятий з відповідним знаком добуток плеча на модуль сили. Знак “+” береться, якщо сила намагається повернути плече проти напрямку стрілки годинника.
Таким чином, для визначення алгебраїчного моменту сили відносно точки треба виконати такі дії (рис. 2.2,а,б):
1. провести лінію дії сили;
2. з вибраної точки опустити перпендикуляр до лінії дії сили (довжина перпендикуляра h – плече сили);
3. знайти добуток плеча h на модуль сили;
4. момент сили буде додатним, якщо сила намагається повернути плече відносно вибраної точки проти напрямку стрілки годинника (рис. 2.2, а) і знак “–“ – за напрямком стрілки годинника (рис. 2.2, б).
|
а) |
б) |
в) |
Окремий випадок (рис. 2.2, в): алгебраїчний момент сили відносно точки дорівнює нулю, якщо лінія дії сили проходить через цю точку (тут плече h=0).
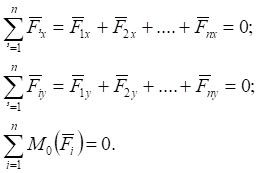
Умови рівноваги довільної плоскої системи сил в аналітичній формі.
Для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб алгебраїчні суми проекцій сил на дві взаємно перпендикулярні осі і алгебраїчна сума моментів відносно довільно вибраної точки дорівнювали нулю.
Питання для самоперевірки знань
та контролю засвоєння матеріалу
1.Яка величина є основним поняттям в механіці?
2. Знайти суму (різницю) двох сил.
3. Знайти векторний (скалярний) добуток двох сил.
4.Методика визначення моменту сили відносно точки.
5. Умови рівноваги плоскої довільно розташованої системи сил.
 Назад
Назад Зміст
Зміст Вперед
Вперед