2.2 Інерційні пиловловлювачі
Ефективність обезпилювання в простій пилоосаджувальній камері може бути збільшена, а габарити її зменшені, якщо ефекту гравітаційного осадження частинок додати додатково момент руху вниз. Цей принцип закладений в основу багатьох конструкцій пиловловлювачів. Типовим представником цього класу пиловловлювачів є „пилові мішки” (рис. 2.2, а), які застосовуються в металургії. В такому апараті вхідна циліндрична труба додає частинкам додатково до гравітаційної сили момент, рівний приблизно g/3. Наприклад, такий пиловловлювач, встановлений за доменною піччю, забезпечує ступінь вловлювання до 65...80% частинок > 30 мкм.
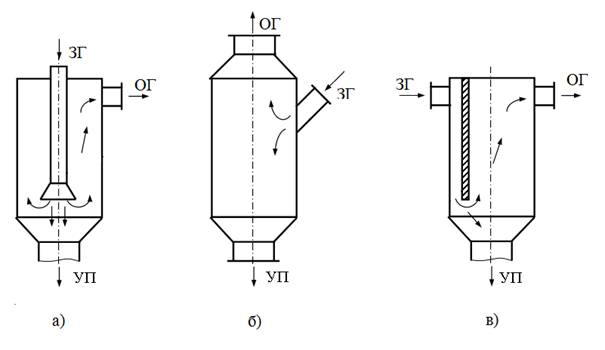
Рисунок 2.2 – Найпростіші пилоосаджувачі інерційної дії:
а) пиловий мішок з центральним підведенням газу;
б) пиловий мішок з боковим підведенням газу;
в) пилоосаджувач з відбивною перегородкою.
Інерційний пиловловлювач, наведений на рис. 2.3 б вмонтовується в газоходи діаметром > 2 м. Випадання великих частинок в бункер відбу-вається внаслідок відхилення потоку від прямолінійного руху.
Камера з перегородкою (рис. 2.2, в) за ефективністю не набагато відрізняється від звичайної осаджувальної камери, але має більший гідравлічний опір, який можна знизити за рахунок більш плавних поворотів.
У сучасних конструкціях інерційних пиловловлювачів механізм осадження частинок заснований на зміні направлення руху. Пилогазовий потік проходить вертикально вниз циліндричним газоходом, потім змінює направлення руху на 180° і проходить через кільцевий зазор. Вловлений пил зсипається в бункер. Ефект пиловловлювання значно залежить від правильно підібраного кільцевого зазору.