4.4 Аналого-цифрові та цифро-аналогові перетворювачі
Аналого-цифрові перетворювачі (АЦП) це пристрої, які приймають вхідні аналогові сигнали та генерують відповідні до них цифрові сигнали, які придатні для обробки мікропроцесорами та іншими цифровими пристроями.
Принципово не виключена можливість безпосереднього перетворення різних фізичних величин в цифрову форму, однак це завдання вдається розв’язати тільки досить рідко через складність таких перетворювачів. Тому зараз найраціональнішим вважається спосіб перетворення різних за фізичною природою величин спочатку в функціонально пов'язані з ними електричні, а потім уже за допомогою перетворювачів напруга - код – в цифрові. Саме ці перетворювачі і мають на увазі, коли говорять про АЦП.
Процедура аналого-цифрового перетворення неперервних сигналів, яку реалізовують за допомогою АЦП, це перетворення неперервної функції часу ![]() , яка описує вхідний сигнал, у послідовність чисел {
, яка описує вхідний сигнал, у послідовність чисел {![]() },
}, ![]() =0,1,2,…, що віднесені до деяких фіксованих моментів часу. Цю процедуру можна розділити на дві самостійні операції: дискретизацію і квантування.
=0,1,2,…, що віднесені до деяких фіксованих моментів часу. Цю процедуру можна розділити на дві самостійні операції: дискретизацію і квантування.
Найпоширенішою формою дискретизації, як зазначалось, є рівномірна дискретизація, в основі якої лежить теорема відліків. Згідно з цією теоремою як коефіцієнти ![]() потрібно використовувати миттєві значення сигналу
потрібно використовувати миттєві значення сигналу ![]() в дискретні моменти часу
в дискретні моменти часу ![]() , а період дискретизації вибирати з умови:
, а період дискретизації вибирати з умови:
![]()
де ![]() – максимальна частота спектра сигналу, що перетворюється.
– максимальна частота спектра сигналу, що перетворюється.
Тоді отримаємо відомий вираз теореми відліків

Для сигналів зі строго обмеженим спектром цей вираз є тотожністю. Однак спектри реальних сигналів прямують до нуля тільки асимптотично. Застосування рівномірної дискретизації до таких сигналів викликає виникнення в системах обробки інформації специфічних високочастотних спотворень, які зумовлені вибіркою. Для зменшення цих спотворень необхідно або збільшувати частоту дискретизації, або використовувати перед АЦП додатковий фільтр нижніх частот, який обмежуватиме спектр вхідного сигналу перед його аналого-цифровим перетворенням.
У загальному випадку вибір частоти дискретизації буде залежати також від вигляду функції ![]() , що використовується в першій формулі розділу та допустимого рівня похибок, які виникають при відновленні початкового сигналу за його відліками. Усе це необхідно враховувати при виборі частоти дискретизації, яка визначає необхідну швидкодію АЦП. Часто цей параметр задають розробнику АЦП.
, що використовується в першій формулі розділу та допустимого рівня похибок, які виникають при відновленні початкового сигналу за його відліками. Усе це необхідно враховувати при виборі частоти дискретизації, яка визначає необхідну швидкодію АЦП. Часто цей параметр задають розробнику АЦП.
Розглянемо докладніше місце АЦП при виконанні операції дискретизації.
Для достатньо вузькосмугових сигналів операцію дискретизації можна виконувати за допомогою самих АЦП і суміщати таким чином з операцією квантування. Основною закономірністю такої дискретизації є те, що за рахунок скінченного часу одного перетворення та невизначеності моменту його закінчення, який, у загальному випадку, залежить від параметрів вхідного сигналу, не вдається отримати однозначної відповідності між значеннями відліків та моментами часу, до яких їх потрібно віднести. В результаті при роботі із сигналами, які змінюються в часі, виникають специфічні похибки, динамічні за своєю природою, для оцінки яких вводять поняття апертурної невизначеності, яка переважно характеризується апертурним часом.
Апертурним часом ![]() називають час, протягом якого зберігається невизначеність між значенням вибірки та часом, до якого вона відноситься. Ефект апертурної невизначеності проявляється або як похибка миттєвого значення сигналу при заданих моментах вимірювання, або як похибка моменту часу, в який проводиться вимірювання при заданому миттєвому значенні сигналу. При рівномірній дискретизації наслідком апертурної невизначеності є виникнення амплітудних похибок, які називаються апертурними та чисельно рівні приростові сигналу протягом апертурного часу.
називають час, протягом якого зберігається невизначеність між значенням вибірки та часом, до якого вона відноситься. Ефект апертурної невизначеності проявляється або як похибка миттєвого значення сигналу при заданих моментах вимірювання, або як похибка моменту часу, в який проводиться вимірювання при заданому миттєвому значенні сигналу. При рівномірній дискретизації наслідком апертурної невизначеності є виникнення амплітудних похибок, які називаються апертурними та чисельно рівні приростові сигналу протягом апертурного часу.
Якщо використовувати іншу інтерпретацію ефекту апертурної невизначеності, то її наявність викликає "тремтіння" істинних моментів часу, в які беруться відліки сигналу, відносно моментів, які рівновіддалені на осі часу. В результаті замість рівномірної дискретизації зі строго постійним періодом проводиться дискретизація с флюктуючим періодом повторення. Це викликає порушення умов теореми відліків та появи уже розглянутих апертурних похибок в системах цифрової обробки інформації.
Таке значення апертурної похибки можна визначити, розклавши вираз для вхідного сигналу в ряд Тейлора в околі точок відліку, який для ![]() -ї точки має вигляд:
-ї точки має вигляд:

та в першому наближенні дає апертурну похибку:
![]()
де ![]() – апертурний час, який для розглянутого випадку в першому наближенні є часом перетворення АЦП.
– апертурний час, який для розглянутого випадку в першому наближенні є часом перетворення АЦП.
Зазвичай для оцінки апертурних похибок використовують синусоїдальний випробувальний сигнал ![]() .
.
Рисунок 4.4 – Утворення апертурної похибки для випадку, коли вона дорівнює крокові квантування
Якщо прийняти, що для ![]() -розрядного АЦП з роздільною здатністю
-розрядного АЦП з роздільною здатністю ![]() апертурна похибка не повинна перевищувати кроку квантування (рис. 4.4), то залежність між частотою сигналу
апертурна похибка не повинна перевищувати кроку квантування (рис. 4.4), то залежність між частотою сигналу ![]() , апертурним часом
, апертурним часом ![]() та відносною апертурною похибкою буде такою:
та відносною апертурною похибкою буде такою: ![]()
Для забезпечення дискретизації синусоїдального сигналу частота якого 100 кГц з похибкою 1% час перетворення АЦП повинен бути рівним 25 нс. У той же час за допомогою такого швидкодіючого АЦП принципово можна дискретизувати сигнали, які мають ширину спектра біля 20 МГц. Таким чином, дискретизація за допомогою самого АЦП викликає суттєве розходження вимог між швидкодією АЦП та періодом дискретизації. Це розходження досягає 2...3 порядків та дуже ускладнює і здорожує процес дискретизації, оскільки навіть для порівняно вузькополосних сигналів потребує досить швидкодіючих АЦП. Для достатньо широкого класу сигналів, які швидко змінюються, цю проблему вирішують за допомогою пристроїв вибірки-зберігання, що мають малий апертурний час.
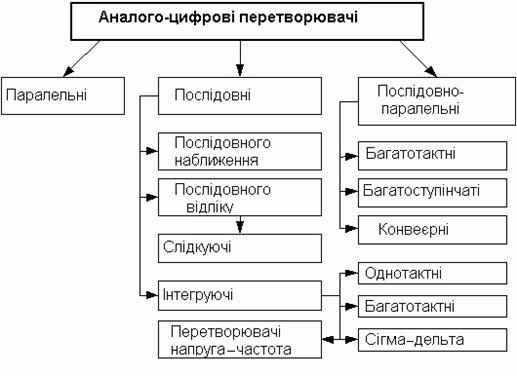
Рисунок 4.5 – Класифікація аналогово-цифрових перетворювачів
Зараз відома велика кількість методів перетворення напруга – код. Ці методи суттєво відрізняються один від одного потенційною точністю, швидкістю перетворення та складністю апаратної реалізації. На рис. 4.5 наведена класифікація АЦП за методами перетворення.
В основу класифікації АЦП покладено ознаку, яка вказує на те, як в часі розгортається процес перетворення аналогової величини в цифрову. В основі перетворення вибіркових значень сигналу в цифрові еквіваленти лежать операції квантування та кодування. Вони можуть проводитись за допомогою або послідовної, або паралельної, або послідовно-паралельної процедур наближення цифрового еквівалента до перетворюваної величини.
Розглянемо детальніше найбільш поширені типи АЦП.
Функціонування аналого-цифрового перетворення за методом послідовного підрахунку можна проілюструвати за допомогою структурної схеми на рис. 4.6.
Рисунок 4.6 – АЦП послідовного підрахунку
До складу схеми входять: генератор тактових сигналів (G), компаратор напруги (КН), схема І, лічильник (ЛЧ), буферний регістр (БР), цифро-аналоговий перетворювач (ЦАП). Схема працює наступним чином. На вхід перетворювача подається аналоговий сигнал ![]() , який підключається до одного з входів компаратора напруги КН. На другий вхід компаратора подається еталонна напруга (
, який підключається до одного з входів компаратора напруги КН. На другий вхід компаратора подається еталонна напруга (![]() ), яка формується на виході ЦАП під управлінням колового слова на виході ЛЧ. Компаратор формує на своєму виході сигнал або логічної одиниці, або логічного нуля в залежності від того, яке значення більше. Якщо
), яка формується на виході ЦАП під управлінням колового слова на виході ЛЧ. Компаратор формує на своєму виході сигнал або логічної одиниці, або логічного нуля в залежності від того, яке значення більше. Якщо ![]() , то на виході компаратора формується одиниця, яка дозволяє проходження імпульсів з тактового генератора через схему І на лічильний вхід лічильника ЛЧ. На виході лічильника йде процес підрахунку цих імпульсів в двійковому коді від 2
, то на виході компаратора формується одиниця, яка дозволяє проходження імпульсів з тактового генератора через схему І на лічильний вхід лічильника ЛЧ. На виході лічильника йде процес підрахунку цих імпульсів в двійковому коді від 2![]() до 2
до 2![]() . Двійковий код з ЛЧ подається на вхід ЦАП, на виході якого формується ступінчатий сигнал
. Двійковий код з ЛЧ подається на вхід ЦАП, на виході якого формується ступінчатий сигнал ![]() . Кожна сходинка цього сигналу відповідає за рівнем інтервалу дискретизації
. Кожна сходинка цього сигналу відповідає за рівнем інтервалу дискретизації ![]() . Сигнал
. Сигнал ![]() порівнюється із сигналом
порівнюється із сигналом ![]() і в момент, коли
і в момент, коли ![]() стає меншим за
стає меншим за ![]() , на виході компаратора формується сигнал логічного нуля. Схема І закривається, лічильник зупиняє підрахунок і набраний двійковий код переписується у вихідний буферний регістр БР для видачі користувачу.
, на виході компаратора формується сигнал логічного нуля. Схема І закривається, лічильник зупиняє підрахунок і набраний двійковий код переписується у вихідний буферний регістр БР для видачі користувачу.
Метод безпосереднього зчитування реалізовується за допомогою так званого АЦП паралельної дії. Такий перетворювач має лінійку 2![]() компараторів напруги, перші входи яких запаралелені і на них подається сигнал
компараторів напруги, перші входи яких запаралелені і на них подається сигнал ![]() . На інші входи під’єднуються виходи подільника еталонної напруги. Виходи компараторів під’єднані до перетворювача одиничного коду в двійковий. Процес перетворення здійснюється за один такт, причому на виході лінійки компараторів до компаратора, який зафіксує
. На інші входи під’єднуються виходи подільника еталонної напруги. Виходи компараторів під’єднані до перетворювача одиничного коду в двійковий. Процес перетворення здійснюється за один такт, причому на виході лінійки компараторів до компаратора, який зафіксує ![]() буде хвиля одиниць, а далі хвиля нулів одиничного коду. Структурно-функціональна схема перетворення зображена на рис. 4.7, а часова діаграма аналогічна рис. 4.9.
буде хвиля одиниць, а далі хвиля нулів одиничного коду. Структурно-функціональна схема перетворення зображена на рис. 4.7, а часова діаграма аналогічна рис. 4.9.
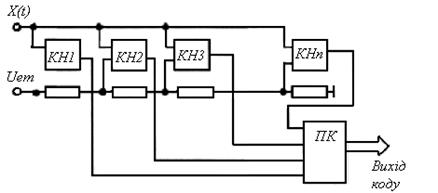
Рисунок 4.7 – АЦП безпосереднього зчитування
Найбільше поширення отримав метод порозрядного зрівноваження, який забезпечує час перетворення від 1 мкс до 1 мс. Структурно-функціональна схема перетворення зображена на рис. 4.8, а часова діаграма – на рис. 4.9.
Рисунок 4.8 – АЦП порозрядного зрівноваження
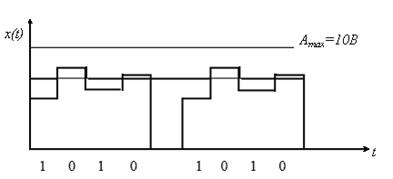
Рисунок 4.9 – Часова діаграма перетворення АЦП за методом порозрядного зрівноваження при ![]()
Схема працює так. На вхід АЦП подається вхідний сигнал ![]() , який порівнюється з еталонним сигналом
, який порівнюється з еталонним сигналом ![]() , що формується на виході ЦАП. ЦАП складається із сукупності
, що формується на виході ЦАП. ЦАП складається із сукупності ![]() еталонних джерел сигналів, які управляються за допомогою спеціального регістра порозрядного зрівноваження (РПУ). Перетворення проходить за
еталонних джерел сигналів, які управляються за допомогою спеціального регістра порозрядного зрівноваження (РПУ). Перетворення проходить за ![]() часових тактових інтервалів. Причому на першому такті РПУ примусово вмикає в роботу перший розряд ЦАП. Значення першого розряду еталонних величин на виході ЦАП дорівнює половині діапазону перетворення сигналу. Потім в кінці першого тактового інтервалу компаратор проводить порівняння
часових тактових інтервалів. Причому на першому такті РПУ примусово вмикає в роботу перший розряд ЦАП. Значення першого розряду еталонних величин на виході ЦАП дорівнює половині діапазону перетворення сигналу. Потім в кінці першого тактового інтервалу компаратор проводить порівняння ![]() з
з ![]() . Якщо
. Якщо ![]() , то примусово увімкнений старший розряд ЦАП залишається ввімкненим до закінчення процесу перетворення. Це забезпечується під управлінням певного сигналу на виході компаратора (1чи 0). Якщо ж
, то примусово увімкнений старший розряд ЦАП залишається ввімкненим до закінчення процесу перетворення. Це забезпечується під управлінням певного сигналу на виході компаратора (1чи 0). Якщо ж ![]() , то перший розряд вимикається на початку другого такту. На початку другого такту в роботу примусово вмикається другий розряд ЦАП і знову проводиться порівняння
, то перший розряд вимикається на початку другого такту. На початку другого такту в роботу примусово вмикається другий розряд ЦАП і знову проводиться порівняння ![]() з
з ![]() . Процедура повторюється доти, поки всі розряди ЦАП не візьмуть участі у процесі зрівноваження. В результаті на виході АЦП формується код, що відповідає вхідному сигналу.
. Процедура повторюється доти, поки всі розряди ЦАП не візьмуть участі у процесі зрівноваження. В результаті на виході АЦП формується код, що відповідає вхідному сигналу.
Інтегруючі АЦП
Відомо, що недоліком послідовних АЦП є низька завадостійкість результатів перетворення. Дійсно, вибірка миттєвого значення вхідної напруги, переважно включає доданок у вигляді миттєвого значення завади. Згодом при цифровій обробці послідовності вибірок ця складова може бути подавлена, однак на це потрібен час та обчислювальні ресурси. Переважно у АЦП вхідний сигнал інтегрується або неперервно, або у певному часовому діапазоні, тривалість якого зазвичай вибирається кратною періодові завади. Це дозволяє в багатьох випадках приглушити заваду ще на етапі перетворення. Платою за це є понижена швидкодія інтегруючих АЦП.
Спрощена схема АЦП, який працює в два основних такти (АЦП двотактного інтегрування), наведена на рис. 4.10.
Рисунок 4.10 – Спрощена схема АЦП двотактного інтегрування
Перетворення проходить протягом двох стадій: стадії інтегрування та стадії підрахунку. На початку першої стадії ключ ![]() замкнутий, а ключ
замкнутий, а ключ ![]() розімкнутий. Інтегратор
розімкнутий. Інтегратор ![]() інтегрує вхідну напругу
інтегрує вхідну напругу ![]() . Час інтегрування вхідної напруги
. Час інтегрування вхідної напруги ![]() постійний; як таймер використовується лічильник з коефіцієнтом підрахунку
постійний; як таймер використовується лічильник з коефіцієнтом підрахунку ![]() , так, що
, так, що
![]()
До моменту закінчення інтегрування вихідна напруга інтегратора складає

де ![]() – середнє за час
– середнє за час ![]() значення вхідної напруги.
значення вхідної напруги.
Після закінчення стадії інтегрування ключ ![]() розмикається, а ключ
розмикається, а ключ ![]() замикається та опорна напруга
замикається та опорна напруга ![]() надходить на вхід інтегратора. При цьому вибирається опорна напруга, протилежна за знаком вхідній напрузі. На стадії підрахунку вихідна напруга інтегратора лінійно зменшується за абсолютною величиною, як показано на рис. 4.11.
надходить на вхід інтегратора. При цьому вибирається опорна напруга, протилежна за знаком вхідній напрузі. На стадії підрахунку вихідна напруга інтегратора лінійно зменшується за абсолютною величиною, як показано на рис. 4.11.
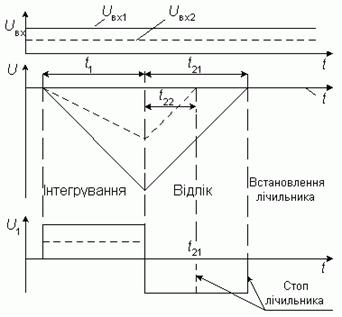
Рисунок 4.11 – Часові діаграми АЦП двотактного інтегрування
Стадія підрахунку закінчується, коли вихідна напруга інтегратора переходить через нуль. При цьому компаратор К переключається та підрахунок зупиняється. Діапазон часу, у якому проходить стадія підрахунку, визначається рівнянням
Далі, виконавши прості математичні дії і врахувавши, що:

де ![]() – вміст лічильника після закінчення стадії підрахунку,
– вміст лічильника після закінчення стадії підрахунку,
отримаємо результат
З цієї формули випливає, що відмітною рисою методу багатотактного інтегрування є те, що ні тактова частота, ні постійна інтегрування ![]() не впливають на результат. Необхідно тільки, щоб тактова частота протягом часу
не впливають на результат. Необхідно тільки, щоб тактова частота протягом часу ![]() залишалася постійною. Це можна забезпечити при використанні простого тактового генератора, оскільки істотні часові чи температурні дрейфи частоти відбуваються за час який більший, ніж час перетворення.
залишалася постійною. Це можна забезпечити при використанні простого тактового генератора, оскільки істотні часові чи температурні дрейфи частоти відбуваються за час який більший, ніж час перетворення.
При виведенні попередніх виразів ми бачили, що в остаточний результат входять не миттєві значення перетворюваної напруги, а тільки значення, усереднені за час ![]() . Тому змінна напруга послабляється тим сильніше, чим вища її частота.
. Тому змінна напруга послабляється тим сильніше, чим вища її частота.
Визначимо коефіцієнт передачі завади ![]() для АЦП двотактного інтегрування. Нехай на вхід інтегратора надходить гармонічний сигнал одиничної амплітуди частотою
для АЦП двотактного інтегрування. Нехай на вхід інтегратора надходить гармонічний сигнал одиничної амплітуди частотою ![]() з довільною початковою фазою
з довільною початковою фазою ![]() . Середнє значення цього сигналу за час інтегрування
. Середнє значення цього сигналу за час інтегрування ![]() дорівнює
дорівнює

Коли ця величина досягає максимуму за модулем, то
Частотна характеристика коефіцієнта приглушення завад АЦП двотактного інтегрування наведена на рис. 4.12.
Рисунок 4.12 – Частотна характеристика коефіцієнта приглушення завад АЦП двотактного інтегрування
Як бачимо змінна напруга, період якої в ціле число раз менший ![]() , приглушується зовсім Тому доцільно вибрати тактову частоту такою, щоб добуток
, приглушується зовсім Тому доцільно вибрати тактову частоту такою, щоб добуток ![]() був рівним чи кратним періоду напруги промислової мережі.
був рівним чи кратним періоду напруги промислової мережі.
Багатоканальні АЦП
Багатоканальні АЦП на сьогодні досить поширені, особливо там, де потрібно об’єднати інформацію, отриману від кількох її джерел, тобто, наприклад, від різних сенсорів. Такі АЦП можна застосовувати, наприклад, для моніторингу напруги на входах, контролю крайніх значень, реєстрації показів, управління виходами (навантаженням) тощо. Схема багатоканального АЦП УМ-АЦП1 на основі мікроконтролера РІC16F876A наведена на рис. 4.13.
Комерційна версія такого пристрою має по 40 входів та виходів, але їх кількість може бути й іншою.
Структурні методи покращення характеристик АЦП
Необхідно відзначити, що висока точність досягається за рахунок як вдосконалення елементної бази, процесу виготовлення, так і застосовуваними матеріалами. Певні відхилення ваг розрядів від необхідних значень зазвичай корегуються шляхом лазерної підгонки в процесі виготовлення резисторів АЦП. При цьому вимагається збільшення площі внутрішньо кристальних компонентів і кристала в цілому, а також виникає проблема вилучення матеріалів кристала в ході пригонки. Ці процеси порушують структуру матеріалів компонентів, зменшують часову і температурну стабільність схеми.
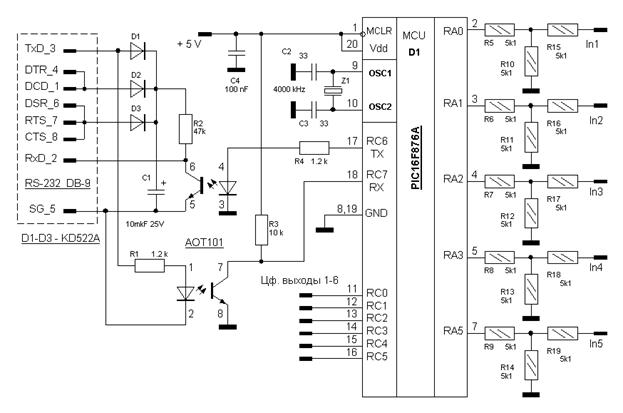
Рисунок 4.13 – Схема багатоканального АЦП УМ-АЦП1
Більш перспективним є підхід, який уникає фізичного впливу на елементи схеми. Наприклад, у випадку використання ЦАП на основі двійкової системи числення, зменшення статичних похибок досягається корекцією вихідної величини шляхом введення поправки в аналоговій формі, що формується додатковим корегувальним ЦАП. В цьому випадку перетворюваний код ![]() подається, як показано на рис. 4.14, на вхід основного ЦАП і в цифровий обчислювальний пристрій (ЦОП).
подається, як показано на рис. 4.14, на вхід основного ЦАП і в цифровий обчислювальний пристрій (ЦОП).
Рисунок 4.14 – Корекція вихідної величини двійкового ЦАП
В ЦОП вираховується код поправки, що надходить на вхід корегувального ЦАП. Результат перетворення ![]() формується за допомогою суматора
формується за допомогою суматора ![]() аналогових величин. Але застосування такого принципу при аналого-цифровому перетворенні дає деяке зниження швидкості пристроїв.
аналогових величин. Але застосування такого принципу при аналого-цифровому перетворенні дає деяке зниження швидкості пристроїв.
Також використовують введення в прилади при розробці інформаційної надмірності у вигляді надлишкових позиційних систем числення (НПСЧ), що комплексно вдосконалює водночас кілька характеристик аналого-цифрового перетворення. Збільшення розрядної сітки пристрою (а відповідно і збільшення кількості тактів при порозрядному зрівноваженні) підвищує точність АЦП середньої і високої швидкості, реалізованих на грубих аналогових вузлах, а з іншого боку підвищує швидкодію високоточних АЦП на елементній базі середньої швидкості.
Підвищення швидкодії багаторозрядних АЦП досягається двома шляхами. Перший орієнтується на використання більш досконалої елементної бази, що не є досить простим шляхом. Другий шлях пов’язаний із введенням надмірності, переважно структурної, при проектуванні.
Цифро-аналогові перетворювачі
Необхідність здійснення операції відновлення вихідного сигналу з дискретних відліків, а також необхідність здійснення операцій формування еталонних сигналів при аналого-цифровому перетворенні висуває задачу цифро-аналогового перетворення. Суть операції цифро-аналогового перетворення полягає у формуванні аналогових сигналів, що відповідають кодовим словам дискретного сигналу. Технічно це формування здійснюється цифро-аналоговим перетворювачем (ЦАП).
Аналоговий сигнал на виході ЦАП може бути сформований шляхом множення опорної напруги ![]() на вагові розрядні коефіцієнти кодового слова
на вагові розрядні коефіцієнти кодового слова ![]() , таким чином, що
, таким чином, що ![]()
Технічно найпростіше ЦАП реалізовується на принципі підсумовування розрядних струмів ![]() (рис. 4.15).
(рис. 4.15).
Схема реалізації ЦАП для підсумовування струму містить джерело стабільної напруги ![]() , матрицю двійково-зважених резисторів
, матрицю двійково-зважених резисторів ![]() , набір ключів
, набір ключів ![]() , що реалізовують розрядні коефіцієнти
, що реалізовують розрядні коефіцієнти ![]() і перетворювач струму в напругу на операційному підсилювачі ОП.
і перетворювач струму в напругу на операційному підсилювачі ОП.
Рисунок 4.15 – ЦАП для підсумовування струму
Часова діаграма класичного процесу цифро-аналогового перетворення має вигляд (рис. 4.16).
Рисунок 4.16 – Часова діаграма процесу ЦА перетворення
При малій кількості дискретних вибірок миттєвих значень сигналу, цей сигнал мало нагадує вихідний, однак може бути наближеним до нього шляхом аналогової фільтрації або інтерполяції.
Основні типи електронних ЦАП
1. Широтно-імпульсний модулятор – найпростіший тип ЦАП. Стабільне джерело струму чи напруги періодично вмикається на час, пропорційний перетворюваному цифровому коду, далі отримана імпульсна послідовність фільтрується аналоговим фільтром низьких частот . Такий спосіб часто використовується для керування швидкістю електромоторів, а також стає популярним в Hi-Fi аудіотехніці.
2. ЦАП передискретизації, такі, як дельта-сигма ЦАП, основані на змінюваній густоті імпульсів. Передискретизація дозволяє використовувати ЦАП з меншою розрядністю для досягнення більшої розрядності кінцевого перетворення; часто дельта-сигма ЦАП будується на основі найпростішого однобітового ЦАП, який є практично лінійним. На ЦАП малої розрядності надходить імпульсний сигнал з модульованою густотою імпульсів (з постійною тривалістю імпульсу, але зі змінною шпаруватістю), створений з використанням негативного зворотного зв’язку. Негативний зворотний зв’язок виступає в ролі фільтра високих частот для шуму квантування. Більшість ЦАП більшої розрядності (більше 16 біт) побудовані на цьому принципі внаслідок його високої лінійності і низької вартості. Швидкодія дельта-сигма ЦАП сягає сотень тисяч відліків в секунду, розрядність – до 24 біт. Для генерації сигналу з модульованою густотою імпульсів можна використати простий дельта-сигма модулятор першого порядку чи більш високого порядку як MASH ( англ. Multi stage noise SHaping). Зі збільшенням частоти передискретизації знижуються вимоги до вихідного фільтра низьких частот і поліпшується приглушення шуму квантування.
3. ЦАП зважування, в якому кожному біту перетворюваного двійкового коду відповідає резистор чи джерело струму, підключене до спільної точки додавання. Сила струму джерела (провідність резистора) пропорційна вазі біта, якому він відповідає. Таким чином, всі ненульові біти коду додаються з вагою. Метод зважування – один з найшвидших, але йому властива низька точність через необхідність наявності набору множини різних прецизійних джерел чи резисторів. Через цю причину ЦАП зважування мають розрядність не більше восьми біт.
4. Ланцюгова R-2R схема є варіацією ЦАП зважування. В R-2R ЦАП зважені значення створюються в спеціальній схемі, яка складається з резисторів опорами R і 2R. Це дозволяє суттєво збільшити точність порівняно зі звичайним ЦАП зважування, оскільки порівняно просто виготовити набір прецизійних елементів з однаковими параметрами. Недоліком методу є більш низька швидкість внаслідок паразитної ємності.
5. Сегментний ЦАП містить по одному джерелу струму чи резистору на кожне можливе значення вихідного сигналу. Так, наприклад, восьмибітовий ЦАП цього типу містить 255 сегментів, а 16-бітовий – 65535. Теоретично, сегментні ЦАП мають найбільшу швидкодію, оскільки для перетворення достатньо замкнути один ключ, який відповідає вхідному коду.
6. Гібридні ЦАП використовують комбінацію перерахованих вище способів. Більшість мікросхем ЦАП належать до цього типу, вибір конкретного набору способів є компромісом між швидкодією, точністю і вартістю ЦАП.
Цифрові вимірювачі неелектричних величин
Сприйняття інформації про об’єкти чи процеси здійснюється за допомогою пристроїв, які називаються первинними перетворювачами чи сенсорами. В більшості випадків сенсори відображають вхідну інформацію у вигляді еквівалентного електричного параметра. Тобто, сенсором називається елемент, який приймає контрольований параметр і перетворює його до вигляду, зручного для подальшої обробки (вимірювання, передачі, контролю).
Відповідно до схеми вмикання сенсорів можна визначити дві групи узгоджувально-нормувальних пристроїв. До першої групи належать пристрої, в яких сенсори є елементами подільників напруги (рис. 4.17, а), до другої – пристрої, в яких сенсори є елементами коливальних систем ВЧ генераторів (рис. 4.17, б).
В пристроях першої групи сенсори найчастіше вмикаються за диференціальною чи мостовою схемою (рис. 4.17, в, г, відповідно).
а) з подільниками напруги; б) з елементами ВЧ генераторів; в) за диференціальною схемою увімкнення; г) за мостовою схемою увімкнення
Диференціальні схеми відрізняються високою стабільністю, оскільки дестабілізуючі фактори одночасно діють на обидва елементи диференціального сенсора, що компенсує цей вплив.
Сенсори в мостовій схемі входять до складу моста, який врівноважений при деякому (звичайно нульовому чи початковому) значенні контрольованого параметра.
При вимірюваннях деяких неелектричних величин не завжди вдається перетворити їх безпосередньо в електричну величину. В цих випадках здійснюють подвійне перетворення первинної вимірюваної величини в проміжну неелектричну величину, яку перетворюють потім у вихідну електричну величину.
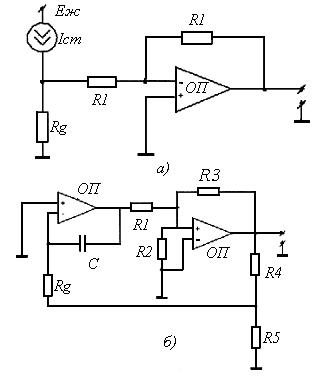
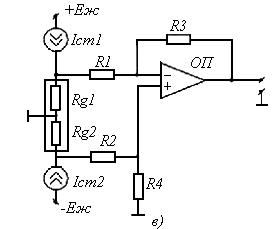
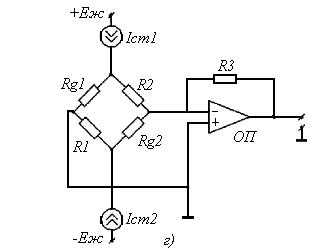
Рисунок 4.17 – Схеми узгодження
Сукупність двох відповідних вимірювальних перетворювачів утворюють комбінований сенсор (рис. 4.18).
Рисунок 4.18 – Блок-схема комбінованого сенсора
Подібні перетворювачі зручні для вимірювання неелектричних (механічних) величин, які викликають в первинному перетворювачі деформацію або переміщення вихідного елемента, до яких чутливий вторинний перетворювач.

1. Що розуміють під системою дискретного часу?
2. Яка головна вимога оптимальності методу дискретизації?
3. У чому полягає суть квантування?
4. У чому відмінність дискретизації від квантування?
5. У чому полягає сутність кодування інформації?
6. Які переваги та недоліки цифрового подання інформації?
7. Як відбувається відновлення сигналів?
8. У яких випадках використовуються поліноми Лагранжа та Тейлора?
9. Поясніть принципи адаптивної дискретизації.
10. У чому сутність теореми Котельникова?
11. Перелічіть основні вимоги до методів цифрового кодування.
12. У чому відмінність між потенціальними та імпульсними кодами?
13. Що розуміють під терміном “апертурний час”?
14. Назвіть та наведіть схеми найбільш поширених типів АЦП.
15. Які основні переваги та недоліки інтегруючих АЦП?
16. Для чого використовуються багатоканальні АЦП?
17. Назвіть та наведіть схеми найбільш поширених типів ЦАП.
18. Наведіть основні схеми цифрових вимірювачів неелектричних величин.