Попередня сторінка Зміст Наступна сторінка Електронні посібники ВНТУ
Заключення
В курсі лекцій подано крок за кроком теорію автоматичного управління – фундаментальні основи і теорію лінійних систем, – рішення лінійних диференційних рівнянь, перетворення Лапласа і його властивості, передаточні функції, перехідні функції стану, згортки.
Аналогічно розглянута теорія лінійних імпульсних систем: рішення різницевих рівнянь, Z-перетворення і його властивості, Z-передаточні функції, перехідні функції стану та їх властивості, згортки.
Така паралельна подача матеріалу полегшує вивчення досить важкого матеріалу дисципліни. Другий фактор такої подачі матеріалу можливість побачити єдину методологію роботи з неперервними та імпульсними класами систем. Ми розглянули основні поняття класичної теорії автоматичного управління. Відомо, що єдиної теорії нелінійних САУ не існує, однак, певні елементи теорії лінійних систем використовуються при роботі з нелінійними системами. Це полегшує освоєння методів аналізу нелінійних різницевих рівнянь. При розгляді випадкових процесів в САУ теж використовується аналог Z-перетворення, згортка розподілів ймовірностей.
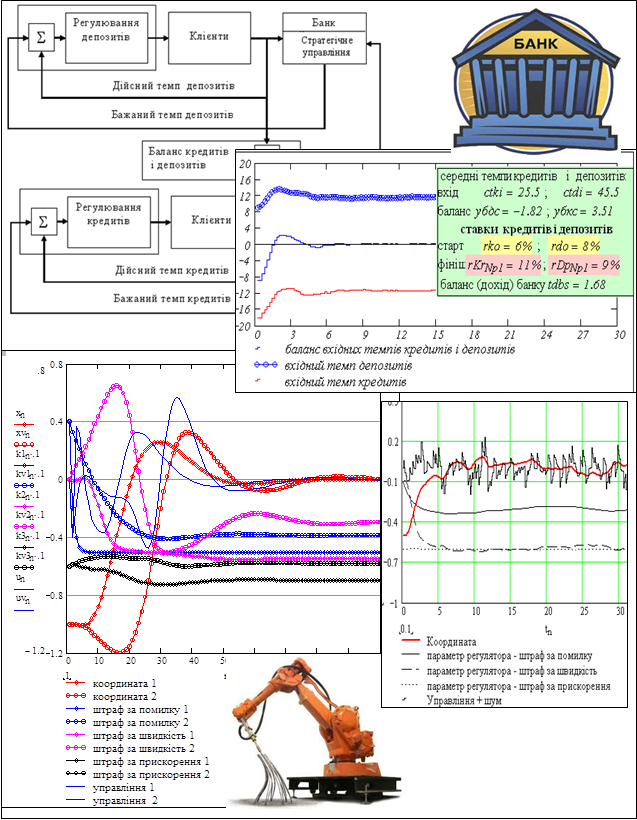
Відсутність єдиної теорії для нелінійних систем спричиняє для окремих класів нелінійних об’єктів управління робити свої методики, методи і методології для аналізу і синтезу САУ. Тому подача матеріалу йде від розгляду конкретних об’єктів і задач управління з застосуванням прикладного системного аналізу, за результатами аналізу будується математична модель у вибраному програмному середовищі. Так в курсі лекцій подані задачі термінального управління, задачі управління банківською системою, системою хімічних реакторів і виробничою системою.
В другій частині посібника подані рішення задач управління з урахуванням невизначеностей і випадкових збурень, де використовуються програмні модулі для знаходження розподілів ймовірностей при нелінійних перетвореннях сигналів з випадковими складовими. Класичні аналітичні методи оперують тільки з гаусівськими розподілами.
Приведені програмні реалізації відомих проектів «інтелектуальних» адаптивних регуляторів. Студент може «власноручно» вивчити, протестувати і модифікувати такі регулятори і отримати власні оцінки переваг і недоліків цих методів адаптивного управління.
Таким чином курс лекцій дає студенту знання і вміння для рішення відомих задач розробки САУ для відомих об’єктів, а також започаткувати власні дослідження стосовно нових методів для нових об’єктів.