Зміст Наступна сторінка Електронні посібники ВНТУ
ЗМІСТ
1 МАТЕМАТИЧНІ ОСНОВИ ТЕОРІЇ АВТОМАТИЧНОГО УПРАВЛІННЯ
1.1 Основні поняття та терміни
1.2 Історія ТАУ
1.3 Приклади об’єктів та систем автоматичного управління
1.4 Склад типової САУ
1.5 Фундаментальні принципи управління
1.6 Динамічні системи
1.7 Лінеаризація. Метод малих збурень
2 АНАЛІЗ НЕПЕРЕРВНИХ СИСТЕМ УПРАВЛІННЯ ТА ММ ЕЛЕМЕНТАРНИХ ЛАНОК САУ
2.1 Аналіз лінійних динамічних систем (ЛДС)
2.1.1 Перетворення Лапласа і його застосування для аналізу та синтезу САУ
2.1.2 Інтерпретації перетворення Лапласа
2.1.3 Властивості перетворення Лапласа
2.1.4 Застосування перетворення Лапласа для розв’язання диференціальних рівнянь. Передаточні функції
2.1.5 Передаточні функції багатомірних САУ
2.2 Частотні характеристики
2.2.1 Експерементальне та аналітичне отримання ЧХ
2.2.2 Аналітичне отримання ЧХ
2.2.3 Приклади отримання ЧХ
2.2.4 Виведення аналітичного виразу для ЧХ
2.2.5 Логарифмічні частотні характеристики
2.2.6 Приклад отримання ЛАЧХ
2.2.7 Класифікація частотних характеристик
2.3 Часові характеристики
2.3.1 Вагова та перехідна функції
2.3.2 Часові характеристики багатомірних САУ. Перехідна функція стану
2.4 Математичні моделі елементарних ланок САУ
2.4.1 Елементарні ланки та їх характеристики
2.4.2 Немінімально-фазові ланки
2.4.3 З’єднання ланок. Структурні схеми
2.4.4 Структурні схеми та їх еквівалентні перетворення
2.4.5 Правила переносу суматора і точки гілкувань крізь блок
2.4.6 Зворотні зв’язки. Класифікація, практичне застосування
3 АНАЛІЗ СТІЙКОСТІ ТА ОЦІНКА ЯКОСТІ РЕГУЛЮВАННЯ НЕПЕРЕРВНИХ САУ
3.1 Проблема стійкості та її сучасні прояви
3.2 Класифікація типів стійкості
3.3 Збурений і незбурений рух
3.4 Теореми Ляпунова про стійкість за першим наближенням (про стійкість лінеаризованих систем)
3.5 Алгебраїчні критерії стійкості
3.5.1 Необхідні умови стійкості
3.5.2 Критерій Рауса
3.5.3 Критерій Гурвиця
3.6 Частотні критерії стійкості
3.6.1 Принцип аргументу
3.6.2 Частотний критерій стійкості Михайлова
3.6.3 Частотний критерій стійкості Найквіста
3.7 Запас стійкості по амплітуді та фазі
3.8 Аналіз стійкості САУ по частотним характеристикам
3.9 Побудова областей стійкості в площині параметрів системи. Метод D-розбиття
3.10 Аналіз стійкості систем з запізненням
3.11 Задача про граничне запізнення
3.12 Оцінка якості регулювання САУ за часовими характеристиками
3.12.1 Непрямі оцінки якості перехідних процесів
3.12.2 Оцінка якості САУ в усталених режимах
3.13 Промислові регулятори
4.1 Огляд і порівняльний аналіз методів синтезу
4.2 Класифікація критеріїв оптимізації САУ
4.3 Класифікація методів синтезу САУ
4.4 Синтез управління по вектору стану
4.5 Синтез управління по вектору стану при неповній його вимірюваності
4.6 Виведення властивостей САУ зі спостерігачем стану
4.7 Стійкість САУ із спостерігачем стану
5 МАТЕМАТИЧНИЙ АПАРАТ АНАЛІЗУ, СИНТЕЗУ ТА ДОСЛІДЖЕННЯ ЦИФРОВИХ СИСТЕМ
5.1 Імпульсні САУ. Приклади імпульсних САУ
5.2 Класифікація ІСАУ
5.3 Динаміка ІСАУ.Поняття про решітчасті функції та різницеві рівняння
5.4 Приклад використання ЦОМ в якості регулятора.Редукція до неперервної САУ
5.5& Z – перетворення
5.5.1 Властивості Z – перетворення
5.5.2 Застосування Z-перетворення для розв’язання лінійних різницевих рівнянь
5.5.3 Z-передаточні функції розімкнених імпульсних систем....
5.5.4 Z-передаточна функція імпульсної системи з фіксатором 0-го порядку
5.5.5 Передаточні функції замкнених ІСАУ
5.6 Стійкість ІСАУ
5.6.1 Критерії стійкості ІСАУ та метод білінійного перетворення
5.6.2 Критерій Шура і Кона
5.6.3 Іннорні критерії стійкості
5.7 Багатовимірні САУ
5.8 Управління з кінцевим часом встановлення (УКЧВ). Спостерігач з кінцевим часом встановлення (СКЧВ)
5.8.1 Синтез УКЧВ і СКЧВ
5.8.2 Область застосування УКЧВ і СКЧВ та особливості синтезу
6 АНАЛІЗ І СИНТЕЗ НЕЛІНІЙНИХ ТА РЕЛЕЙНИХ САУ
6.1 Нелінійні системи. Визначення. Класифікація. Характеристики нелінійних систем
6.2 З’єднання нелінійних ланок
6.3 Методи фазового простору
6.3.1 Властивості фазових траєкторій
6.3.2 Класифікація особливих точок
6.4 Стійкість нелінійних систем
6.4.1 Другий метод Ляпунова
6.4.2 Абсолютна стійкість. Критерій абсолютної стійкості В. М. Попова
7 АНАЛІЗ І СИНТЕЗ ТЕРМІНАЛЬНИХ САУ
7.1 Класифікація задач термінального управління
7.2 Постановка задачі термінального управління
7.3 Розв’язання задачі розгону
7.4 Розв’язання задачі приведення
7.5 Розв’язок задачі зближення
7.6 Структурна схема термінальної САУ
7.7 Термінальне управління при застосуванні декількох паралельно працюючих виконавчих елементів (приводів)
7.8 Принципи розв’язку термінального управління для багатомірного об’єкта
7.9 Структурна схема термінальної САУ
7.10 Загальні властивості управління по вищій похідній
8.1 Оптимальні САУ. Класифікація оптимальних САУ
8.1.1 Постановка задачі оптимізації
8.1.2 Класифікація критеріїв оптимізації
8.1.3 Методи оптимізації
8.1.4 Синтез оптимального за швидкодією управління
8.2 Система оптимального управління синтезом стиролу
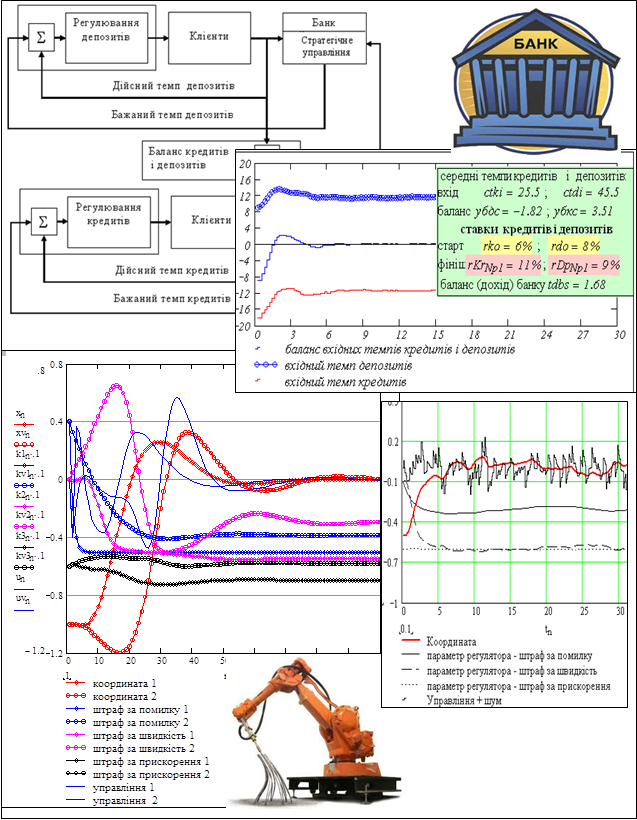
8.3 Оптимальне управління банківською системою
9.1 Адаптивні САУ з настроюванням власної частоти
9.2 "Швидка" адаптивна САУ
9.3 Адаптивна САУ на базі нечіткої логіки
9.4 Адаптивна САУ на базі нейронної мережі
ВСТУП
Зміст курсу лекцій відповідає робочій програмі навчальної дисципліни “Теорія автоматичного управління”. Теорія автоматичного управління – фундаментальна наукова дисципліна, яка формує у студентів знання про загальні принципи і процеси функціонування автоматичних систем управління найрізноманітнішими об’єктами. Мета даного курсу лекцій – формування у студентів знань, умінь та навичок з розв’язання задач аналізу та синтезу автоматичних систем управління для сучасних об’єктів за умов невизначеностей і збурень.
Курс лекцій дає можливість отримати такі знання:
- фундаментальні принципи побудови систем управління поточним і кінцевим станом, програмного та зі зворотними зв’язками; математичні моделі об’єктів та засобів управління і методику отримання математичних моделей;
- методику математичного опису автоматичних систем з простими об’єктами, методи лінеаризації статичних характеристик елементів системи та складання рівнянь статики і динаміки;
- форми опису та подання динамічних властивостей елементів та систем – диференціальні рівняння, передаточні функції, частотні та часові характеристики;
- правила перетворення структурних схем, отримання еквівалентних передаточних функцій для замкнених автоматичних систем регулювання;
- методи оцінки стійкості САУ, критерії стійкості, визначення областей стійкості, показники та критерії якості перехідних процесів;
- розробка математичних моделей довільних нелінійних систем для аналізу і синтезу правління з урахуванням запізнень, застосування методу фазового простору до їх аналізу, методи лінеаризації та оцінки стійкості та якості перехідних процесів;
- приклади моделювання, аналізу і синтезу оптимальних і адаптивних САУ.
Сьогодні практично немає обмежень на складність алгоритмів управління, зокрема фільтрації, ідентифікації, оптимізації. Не проблема і онлайновий (під час функціонування САУ) синтез параметрів регулятора. Вартість апаратних засобів для реалізації системи автоматичного управління – сенсорів, виконавчих елементів і мікроконтролерів - зменшилась в десятки разів. Ефективна адаптивна САУ на базі мікроконтролерів знаходить параметри регулятора пошуковими методами, і аналітичні методи немов би вже і непотрібні. Фундаментальні методи ТАУ, теорія лінійних систем є необхідною базою, яка орієнтована на комп’ютер методи.
В останніх розділах посібника подані рішення задач аналізу і синтезу адаптивних САУ для нестандартних об’єктів управління – хімічного реактора, банка. Подані приклади «інтелектуальних регуляторів» - на базі нечіткої логіки, штучних нейронних мереж. Це вже матеріал для переходу студента до самостійних пошуків нових рішень для нових задач управління. Для таких систем відсутні загальні методи синтезу. Кожний новий об’єкт управління вимагає пошуку нових методів, нових способів управління, а для простих регуляторів простих лінійних об’єктів всі задачі аналізу і синтезу вирішують комп’ютерні системи.
Посібник попри невеликий обсяг дає студенту потрібні знання з ТАУ.