4.5 Порівняння деяких протоколів динамічної маршрутизації
Як зазначалось вище, алгоритми динамічної маршрутизації поділя-ються на дистанційно-векторні (DVA) та стану зв’язків (LSA). В дистан-ційно-векторних протоколах для знаходження найкрашого шляху використовується алгоритм Беллмана-Форда. Деякі DVA періодично розсилають сусідам повні ТМ, що може породжувати значний трафік. DVA не мають уявлення про топологію усієї мережі. Вони знають про віддалені мережі лише відстань до них і вихідний порт (або адресу наступного хопа).
Протоколи DVA працюють найкраще в ситуаціях, коли [1, 16]: мережа проста і не потребує спеціальної ієрархічної структури; адміністратори не мають достатньо знань щодо вибору конфігурації та підтримки LSA; використовуються специфічні типи мереж, наприклад, мережі типу hub-and-spoke; час конвергенції у найгіршому випадку для мережі непринципові.
В LSA для знаходження найкрашого шляху використовується алго-ритм Дейкстри. Маршрутизатори знають про всю КМ шляхом збирання інформації від усіх маршрутизаторів. Кожен маршрутизатор має повну топологічну карту КМ. Всі маршрутизатори КМ використовують одну й ту ж топологічну карту. LSA не здійснюють періодичних оновлень. Після конвергенції КМ оновлення надсилаються лише у випадку змін її топології.
Протоколи LSA працюють найкраще в ситуаціях, коли: КМ велика та ієрархічна; адміністратор має достатньо знань; швидка конвергенція у КМ дуже актуальна.
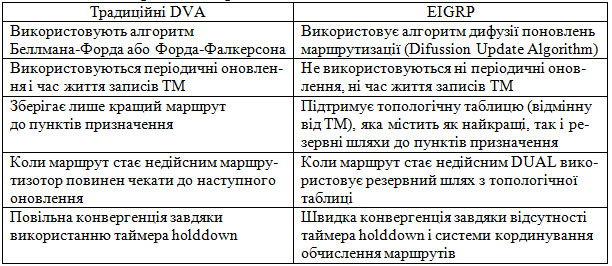
Порівняння традиційних дистанційно-векторних протоколів з протоколом EIGRP наведено у табл. 4.2, а деяких протоколів динамічної маршрутизації – у табл. 4.3.
Таблиця 4.2 – Порівняння традиційних DVA з EIGRP
Таблиця 4.3 – Порівняння деяких протоколів динамічної маршрутизації

Порівняння OSPF з RIP
Порівняння протоколів OSPF і RIP не зовсім правомірно, оскільки ці два протоколи призначені для мережевого середовища абсолютно різних типів. Протокол OSPF призначений для використання у великих, складних мережах, спроектованих на основі продуманого підходу. Протокол RIP призначений для невеликих мереж, в яких застосування простого протоколу дозволяє спростити проектування і скоротити тривалість настройки конфігурації. По суті, якщо мережа є достатньо невеликою для того, щоб в ній можна було застосовувати протокол RIP, то краще зупинитися на протоколі RIP, а потім перейти на EIGRP [15].
Переваги OSPF у порівнянні з RIP: набагато більш масштабова-ний; підтримує VLSM та CIDR (на відміну від RIPv1); в цілому у достатньо стійких мережах споживає менше мережевих ресурсів; забезпечує вибір кращих маршрутів; дозволяє коректно запобігти маршрутним циклам; характеризується кориснішою метрикою; сприяє створенню ієрархічних проектів мереж; забезпечує швидкий перехід мережі у сталий стан.
Недоліки OSPF у порівнянні з RIP: не допускає використання ієрархічних проектів у поєднанні з погано спроектованими структурами IP; є набагато більш складним порівняно з RIP; потребує більших ресурсів процесора і оперативної пам’яті; потребує більших витрат часу на проектування і реалізацію.
Порівняння OSPF з EIGRP
Протоколи OSPF і EIGRP фактично багато в чому аналогічні. У протоколі EIGRP, як і в OSPF передбачено формування таблиці топології і пошук на її основі маршрутів до одержувачів. Крім того, при звичайних обставинах протокол EIGRP, як і OSPF виключає можливість створення маршрутних циклів. Проте в деяких умовах протокол OSPF є доцільнішим, ніж EIGRP, а в інших – навпаки.
Переваги OSPF у порівнянні з ЕIGRP: сприяє створенню ієрархічних проектів мереж; має менш складну метрику порівняно із складеною метрикою ЕIGRP; не схильний до проблем, пов'язаних з постійним перебуванням маршруту в активному стані; не залежить від виробника конкретного продукту.
Недоліки OSPF у порівнянні з ЕIGRP: метрика не така гнучка, як складена метрика ЕIGRP; не забезпечує розподілу навантаження по маршрутух з нерівною вартістю; не допускає використання ієрархічних проектів в поєднанні з погано спроектованими структурами IP; потребує більших ресурсів процесора і оперативної пам’яті; потребує більших витрат часу на проектування і реалізацію.