Інженери в практичній діяльності постійно зіштовхуються з необхідністю виявлення видів зв'язку в процесах та явищах і необхідністю їх математичного опису. Якщо деяка величина y, що характеризує процес, залежить від сукупності незв’язаних між собою величин ![]() таким чином, що кожному набору
таким чином, що кожному набору ![]() відповідає значення величини
відповідає значення величини ![]() , така однозначна відповідність величини
, така однозначна відповідність величини ![]() сукупності незалежних змінних
сукупності незалежних змінних ![]() називається функціональною залежністю, а сама змінна величина y – функцією змінних величин
називається функціональною залежністю, а сама змінна величина y – функцією змінних величин ![]() , що формально записується у вигляді
, що формально записується у вигляді ![]() . Так, вираз
. Так, вираз ![]() є функцією трьох змінних.
є функцією трьох змінних.
Наприклад, площа кола ![]() є функцією незалежної змінної – радіуса кола R, тобто
є функцією незалежної змінної – радіуса кола R, тобто ![]() , конкретний вигляд цієї функції
, конкретний вигляд цієї функції ![]() . Об‘єм фігури є вже функцією трьох вимірів:
. Об‘єм фігури є вже функцією трьох вимірів: ![]() , і в залежності від вигляду фігури цей функціональний зв'язок відповідно конкретизується.
, і в залежності від вигляду фігури цей функціональний зв'язок відповідно конкретизується.
З курсу математичного аналізу відомі три способи завдання функціональних залежностей:
Так, наприклад, в результаті математичної обробки можна отримати наступну аналітичну залежність грошових кредитів в сільському господарстві під товарно-матеріальні цінності і сезонні витрати від витрат на велику рогату худобу: ![]() , де y - кредити під товарно-матеріальні цінності;
, де y - кредити під товарно-матеріальні цінності; ![]() - витрати на велику рогату худобу. Інший приклад аналітичної залежності: зв'язок шляху з часом в рівноприскореному русі виражається як
- витрати на велику рогату худобу. Інший приклад аналітичної залежності: зв'язок шляху з часом в рівноприскореному русі виражається як ![]() .
.
Позитивною властивістю аналітичного способу завдання є можливість одержувати значення ![]() для будь-якого фіксованого аргументу
для будь-якого фіксованого аргументу ![]() з будь-якою точністю. До недоліків цього засобу слід віднести те, що потрібно повторювати всю послідовність обчислень; крім того, аналітичний засіб не володіє наочністю. Вказані недоліки аналітичного засобу усуваються у випадку графічного завдання функції
з будь-якою точністю. До недоліків цього засобу слід віднести те, що потрібно повторювати всю послідовність обчислень; крім того, аналітичний засіб не володіє наочністю. Вказані недоліки аналітичного засобу усуваються у випадку графічного завдання функції ![]() .
.
Табличний спосіб завдання функцій розповсюджений у техніці, фізиці, економіці, природознавстві та найчастіше всього використовується для запису результатів експерименту.
Нехай, наприклад, в результаті досліду отримана залежність омічного опору R мідного стержня від температури ![]() у вигляді таблиці 5.1:
у вигляді таблиці 5.1:
Таблиця 5.1 – Результати експериментальних досліджень
R |
77.80 |
79.75 |
80.80 |
82.35 |
83.90 |
85.10 |
t0 |
25.0 |
30.1 |
36.0 |
40.0 |
45.1 |
50.0 |
В цьому експерименті значення омічного опору мідного стержня змінюється при коливанні температури і є залежною змінною.
Перевагою табличного способу завдання експериментальної функції є те, що для кожного значення незалежної змінної, поміщеної в таблицю, можна відразу ж, без усяких вимірів і обчислень, знайти відповідне значення функції. Недолік табличного способу полягає в тому, що не можна задати всю функцію скрізь, тобто завжди знайдуться такі значення незалежної змінної, яких немає в таблиці. Тому, для аналізу результатів інженерних експериментів дуже зручно використовувати як табличний так і аналітичний способи представлення залежностей, що досліджуються.
Так, якщо в результаті інженерного або наукового експерименту отримана система точок: ![]() , то дуже часто виникає задача пошуку аналітичної залежності, яка б зв‘язувала експериментальні дані у вигляді аналітичної функції
, то дуже часто виникає задача пошуку аналітичної залежності, яка б зв‘язувала експериментальні дані у вигляді аналітичної функції ![]() . Для розв’язування цієї задачі за допомогою чисельних методів на ЕОМ використовуються два підходи:
. Для розв’язування цієї задачі за допомогою чисельних методів на ЕОМ використовуються два підходи:
1. Інтерполяція – підхід, за допомогою якого отримують аналітичні залежності табличних функцій за умови, що аналітична функція ![]() повинна проходити через всі задані експериментальні точки.
повинна проходити через всі задані експериментальні точки.
2. Апроксимація – підхід, за допомогою якого знаходиться аналітична функція ![]() , що “найкращим чином” наближається до заданої табличної функції. Звичайно “найкращим чином” – це критерій, в якості якого використовується критерій середньо квадратичного відхилення (СКВ), заснований на тому, що сума квадратів відхилень аналітичної функції
, що “найкращим чином” наближається до заданої табличної функції. Звичайно “найкращим чином” – це критерій, в якості якого використовується критерій середньо квадратичного відхилення (СКВ), заснований на тому, що сума квадратів відхилень аналітичної функції ![]() від експериментальної
від експериментальної ![]() (при і=0, 1, …, k) повинна бути мінімальною:
(при і=0, 1, …, k) повинна бути мінімальною:
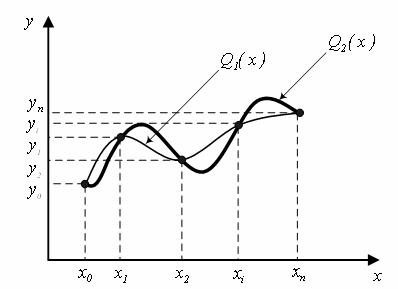
На рисунку 5.1 представлена класифікація відомих методів наближення табличних функцій, призначених для пошуку аналітичної залежності ![]() , яка б зв‘язувала експериментальні дані
, яка б зв‘язувала експериментальні дані ![]() , отримані в результаті інженерного або наукового експерименту.
, отримані в результаті інженерного або наукового експерименту.

В економіці і техніці постійно приходиться зіштовхуватися з необхідністю обчислення значень функції ![]() в точках
в точках ![]() , відмінних від значень аргументу, фіксованих в таблиці експериментальних досліджень. Крім того, в деяких випадках, незважаючи на те, що аналітичний вираз функції
, відмінних від значень аргументу, фіксованих в таблиці експериментальних досліджень. Крім того, в деяких випадках, незважаючи на те, що аналітичний вираз функції ![]() відомий, він є занадто складним і незручним для подальших математичних перетворень. Подібні задачі формалізуються як задачі інтерполювання.
відомий, він є занадто складним і незручним для подальших математичних перетворень. Подібні задачі формалізуються як задачі інтерполювання.
Нехай на відрізку ![]() функція
функція ![]() задана системою точок
задана системою точок ![]() , де значення
, де значення ![]() називаються вузлами інтерполяції. Необхідно знайти аналітичну залежність
називаються вузлами інтерполяції. Необхідно знайти аналітичну залежність ![]() , співпадаючої у вузлах інтерполяції зі значеннями заданої функції, тобто
, співпадаючої у вузлах інтерполяції зі значеннями заданої функції, тобто ![]() Процес обчислення значень функції
Процес обчислення значень функції ![]() в точках
в точках ![]() , відмінних від вузлів інтерполяції, називають інтерполюванням функції
, відмінних від вузлів інтерполяції, називають інтерполюванням функції ![]() (рисунок 5.1).
(рисунок 5.1).
Якщо аргумент ![]() знаходиться за межами відрізка інтерполювання
знаходиться за межами відрізка інтерполювання ![]() , то задача визначення значення функції
, то задача визначення значення функції ![]() в точці
в точці ![]() називається екстраполюванням.
називається екстраполюванням.
Слідує відмітити, що задача інтерполювання стає однозначною, якщо в якості функції ![]() вибрати багаточлен
вибрати багаточлен ![]() степені не вище n, такий, що
степені не вище n, такий, що ![]() . Багаточлен
. Багаточлен ![]() , що задовольняє цим умовам, називають інтерполяційним багаточленом, а відповідні формули – інтерполяційними формулами.
, що задовольняє цим умовам, називають інтерполяційним багаточленом, а відповідні формули – інтерполяційними формулами.
У випадку, коли ![]() береться з класу степеневих функцій, інтерполяція називається параболічною. Цей спосіб наближення ґрунтується на тому, що на невеликих відрізках експериментальна функція
береться з класу степеневих функцій, інтерполяція називається параболічною. Цей спосіб наближення ґрунтується на тому, що на невеликих відрізках експериментальна функція ![]() може бути достатньо добре апроксимована параболою певного порядку. Якщо в якості інтерполяційної функції використовувати багаточлен виду:
може бути достатньо добре апроксимована параболою певного порядку. Якщо в якості інтерполяційної функції використовувати багаточлен виду:
![]() (5.1)
(5.1)
то така інтерполяція називається степеневою
Інколи доцільно використати інші види інтерполяції. Якщо функція, що досліджується, ![]() – періодична, то в якості інтерполяційної функції
– періодична, то в якості інтерполяційної функції ![]() (
(![]() ) вибирають тригонометричну, наприклад, виду:
) вибирають тригонометричну, наприклад, виду:
![]() (5.2)
(5.2)
і така інтерполяція називається тригонометричною. В деяких в якості інтерполяційної функції ![]() (
(![]() ) вибирають раціональні функції.
) вибирають раціональні функції.
При інтерполюванні виникає ряд задач:
1. вибір найбільш зручного способу побудови інтерполяційної функції для кожного конкретного випадку;
2. оцінка похибки при заміні ![]() інтерполяційною функцією
інтерполяційною функцією ![]() на відрізку
на відрізку ![]() , оскільки функції
, оскільки функції ![]() та
та ![]() співпадають тільки у вузлах інтерполяції
співпадають тільки у вузлах інтерполяції ![]() ;
;
3. оптимальний вибір вузлів інтерполяції для отримання мінімальної похибки.
Для задачі інтерполювання важливим є визначення того, як повинна вести себе інтерполяційна функція між заданими точками, так як ці точки можуть бути інтерпольовані множиною різноманітних функцій, і необхідно мати певний критерій вибору. Звичайно критерій формується в термінах гладкості та простоти. Більшість інтерполяційних функції генеруються лінійними комбінаціями найпростіших функцій. Лінійні комбінації одночленів ![]() формують степеневі поліноми, лінійні комбінації тригонометричних функцій
формують степеневі поліноми, лінійні комбінації тригонометричних функцій ![]() формують тригонометричні поліноми, використовуються також лінійні комбінації експонент
формують тригонометричні поліноми, використовуються також лінійні комбінації експонент ![]() . Найбільш важливим класом інтерполяційних функцій є множина алгебраїчних поліномів. Поліноми мають переваги з точки зору алгоритмізації, тому що їх значення легко обчисляти, додавати, перемножувати, інтегрувати чи диференціювати. Важливою властивістю поліномів є те що якщо с – константа, а p(x)- поліном, то поліномами будуть і p(cx) і p(x+c)
. Найбільш важливим класом інтерполяційних функцій є множина алгебраїчних поліномів. Поліноми мають переваги з точки зору алгоритмізації, тому що їх значення легко обчисляти, додавати, перемножувати, інтегрувати чи диференціювати. Важливою властивістю поліномів є те що якщо с – константа, а p(x)- поліном, то поліномами будуть і p(cx) і p(x+c)
Клас інтерполяційних функції обирають, використовуючи теорему Вейерштраса:
Якщо f(х) – неперервна на кінцевому інтервалі ![]() функція, то для любого
функція, то для любого ![]() існують поліном pn(x) ступеня n такий, що
існують поліном pn(x) ступеня n такий, що ![]() .
.
Найбільш загальною формулою параболічного інтерполювання є інтерполяційна формула Лагранжа. Задача параболічного інтерполювання в цьому випадку формулюється наступним чином: на відрізку ![]() у вузлах інтерполяції
у вузлах інтерполяції ![]() задається функція
задається функція ![]() своїми
своїми ![]() значеннями
значеннями
![]()
![]()
![]() ,
,
необхідно побудувати багаточлен ![]() так, щоб у вузлах інтерполяції
так, щоб у вузлах інтерполяції ![]() його значення співпадали зі значеннями заданої функції, тобто
його значення співпадали зі значеннями заданої функції, тобто ![]()
![]() …,
…,![]() Слід відзначити, що в такій постановці задачі вузли інтерполяції
Слід відзначити, що в такій постановці задачі вузли інтерполяції ![]() можуть бути довільно розташовані один від одного на відрізку
можуть бути довільно розташовані один від одного на відрізку ![]() , іншими словами, вузли інтерполяції не рівновіддалені, тобто
, іншими словами, вузли інтерполяції не рівновіддалені, тобто ![]() . Величина
. Величина ![]() називається кроком інтерполяції.
називається кроком інтерполяції.
Задача інтерполювання має розв‘язок, якщо степінь m багаточлена ![]() яким замінюється функція
яким замінюється функція ![]() , не вище порядку
, не вище порядку ![]() (
(![]() ). Тоді задача інтерполювання зводиться до пошуку невідомих постійних коефіцієнтів багаточлена
). Тоді задача інтерполювання зводиться до пошуку невідомих постійних коефіцієнтів багаточлена ![]() з системи рівнянь, яка будується наступним чином. З початкових умов відомо, що функція
з системи рівнянь, яка будується наступним чином. З початкових умов відомо, що функція ![]() в вузлах
в вузлах ![]() приймає значення
приймає значення ![]()
![]() Тоді в вузлі
Тоді в вузлі ![]() інтерполяційний
інтерполяційний
багаточлен ![]() має вигляд
має вигляд ![]() в вузлі інтерполяції
в вузлі інтерполяції ![]() -
- ![]() і так далі. Нарешті, в вузлі
і так далі. Нарешті, в вузлі ![]() інтерполяційний багаточлен
інтерполяційний багаточлен ![]() буде виглядати
буде виглядати
![]() .
.
Запишемо це у вигляді системи ![]() рівнянь з
рівнянь з ![]() невідомими
невідомими ![]()
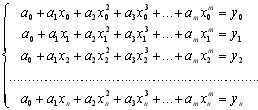 , (5.3)
, (5.3)
де ![]() і
і ![]() табличні значення аргументу і функції, що досліджується. Невідомі коефіцієнти
табличні значення аргументу і функції, що досліджується. Невідомі коефіцієнти ![]() знаходяться по формулам Крамера:
знаходяться по формулам Крамера:
![]() , (5.4)
, (5.4)
де ![]() - визначник системи (5.3).
- визначник системи (5.3).
Якщо ![]() (тобто коли
(тобто коли ![]() різні), то система (5.3) має єдиний розв’язок. Якщо знайти коефіцієнти
різні), то система (5.3) має єдиний розв’язок. Якщо знайти коефіцієнти ![]() , можна уявити інтерполяційний багаточлен у вигляді
, можна уявити інтерполяційний багаточлен у вигляді
![]()
Перепишемо багаточлен в іншій формі:
![]() (5.5)
(5.5)
Легко перевірити, що функція ![]() повинна задовольняти умовам
повинна задовольняти умовам
![]()
![]() (5.6)
(5.6)
В точках ![]()
![]() функція
функція ![]() обертається в 0, а в точці
обертається в 0, а в точці ![]() дорівнює 1.
дорівнює 1.
Остаточно отримаємо вираз (5.7)
![]()
![]() (5.7)
(5.7)
Цей багаточлен називається інтерполяційним багаточленом Лагранжа. В спрощеному вигляді його можна записати так:
![]() (5.8)
(5.8)
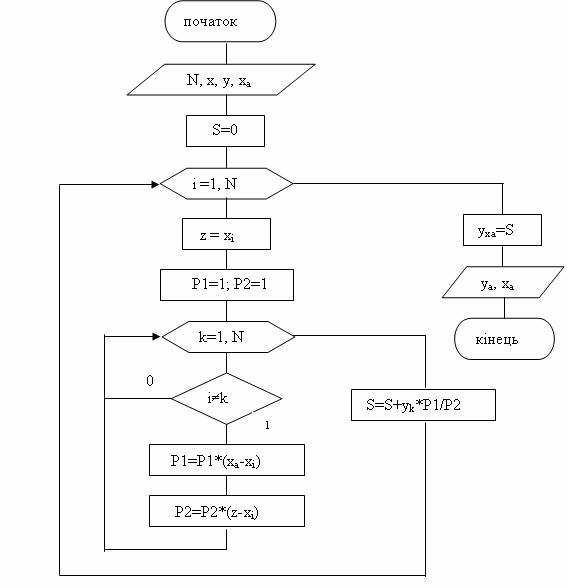
Даний метод легко алгоритмізується і може використовуватися для розробки програм інтерполяції. Схема алгоритму метода представлена на рисунку 5.3.
Приклад: Побудувати інтерполяційний багаточлен Лагранжа для функції заданої таблично.
n |
0 |
1 |
2 |
3 |
x |
1 |
2 |
3 |
5 |
y |
1 |
5 |
4 |
8 |
n=4; m=n-1=4-1=3. Припустимо, що y=a0+a1x+a2x2+a3x3.
Слід пам’ятати, що при екстраполяції функції, чим далі значення х від інтервалу спостереження, тим отримане значення функції містить більшу похибку.
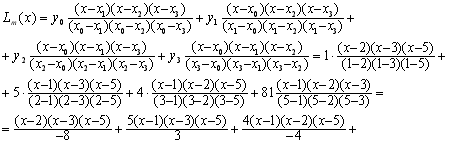
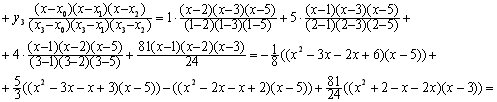
![]()
![]()
![]()
![]()
Таким чином: ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
Висновки:
1. Таким чином за допомогою багаточлена Лагранжа були отримані коефіцієнти інтерполяційної функції ![]() :
: ![]() .
.
2. Використовуючи отриманий багаточлен можливо знайти будь-яке значення функції ![]() для заданого
для заданого ![]() . Наприклад, для
. Наприклад, для![]()
![]()
![]()
3. Використовуючи інтерполяційний багаточлен можливо отримати значення функції ![]() за межами спостережень. У даному прикладі інтервал спостереження
за межами спостережень. У даному прикладі інтервал спостереження ![]() . Така задача називається екстраполяція (прогнозування функції).
. Така задача називається екстраполяція (прогнозування функції).
Для оцінки похибки інтерполяційного багаточлена Лагранжа використовують формулу:
![]() ,
,
причому ![]() , при
, при ![]()
Якщо функція, що досліджується, задана значеннями ![]()
![]()
![]() в рівновіддалених вузлах інтерполяції, тобто
в рівновіддалених вузлах інтерполяції, тобто ![]() , то для побудови її аналітичної залежності зручно використовувати першу інтерполяційну формулу Ньютона.
, то для побудови її аналітичної залежності зручно використовувати першу інтерполяційну формулу Ньютона.
Для виводу інтерполяційних формул для рівновіддалених вузлів інтерполяції вводиться поняття кінцевої різниці.
Поставимо наступну задачу: для функції ![]() , яка задана таблицею значень
, яка задана таблицею значень ![]() причому x змінюється з однаковим кроком h, тобто
причому x змінюється з однаковим кроком h, тобто ![]() , побудувати кінцеві різниці.
, побудувати кінцеві різниці.
Кінцевою різницею першого порядку ![]() називається різність між значеннями функції в сусідніх вузлах інтерполяції:
називається різність між значеннями функції в сусідніх вузлах інтерполяції:
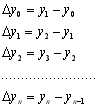
В загальному вигляді кінцеву різницю першого порядку ![]() можна записати як
можна записати як ![]() .
.
Кінцева різниця другого порядку ![]()
![]() складається з кінцевих різниць першого порядку:
складається з кінцевих різниць першого порядку:
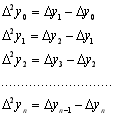
Кінцева різниця n-го порядку ![]()
![]() складається з кінцевих різниць
складається з кінцевих різниць ![]() -го порядку:
-го порядку:
 ,
,
або в технічної літературі використовують наступну формулу кінцевої різниці ![]() -го порядку:
-го порядку:
![]()
Нехай необхідно побудувати інтерполяційний багаточлен ![]() степеню
степеню ![]() такий, що
такий, що ![]()
![]()
Будемо шукати багаточлен виду ![]() (5.9)
(5.9)
В цьому виразі невідомі коефіцієнти ![]() . Для того щоб знайти
. Для того щоб знайти ![]() , покладемо
, покладемо ![]() . Тоді при підстановці
. Тоді при підстановці ![]() в вираз (5.9) всі складові, окрім першої, обернуться в нуль, тобто
в вираз (5.9) всі складові, окрім першої, обернуться в нуль, тобто ![]() а значення функції в точці
а значення функції в точці ![]() відомі з умови задачі:
відомі з умови задачі: ![]() Отже
Отже ![]()
Щоб знайти коефіцієнт ![]() складемо першу кінцеву різницю для багаточлена
складемо першу кінцеву різницю для багаточлена ![]() в точці x:
в точці x:
![]()
Зробивши всі підстановки, отримаємо:
![]()
![]()
![]()
![]()
Обчислимо першу кінцеву різницю багаточлена в точці ![]() Тут також всі члени, окрім першого, обернуться в нуль, і, отже,
Тут також всі члени, окрім першого, обернуться в нуль, і, отже, ![]() але
але
![]()
звідки ![]() і
і ![]()
Щоб визначити коефіцієнт ![]() складаємо кінцеву різницю другого порядку:
складаємо кінцеву різницю другого порядку:
![]()
Після перетворень отримаємо
![]()
Вважаємо ![]() ; тоді всі члени, окрім першого, знов обернуться в нуль і
; тоді всі члени, окрім першого, знов обернуться в нуль і ![]() Звідси
Звідси
![]()
Обчислюючи кінцеві різниці більш високих порядків і вважаючи ![]() , прийдемо до загальної формули для отримання коефіцієнтів:
, прийдемо до загальної формули для отримання коефіцієнтів:
![]() (5.10)
(5.10)
де будемо вважати, що ![]() та
та ![]() Підставивши знайденні значення коефіцієнтів
Підставивши знайденні значення коефіцієнтів ![]() в вираз (5.9), отримаємо першу інтерполяційну формулу Ньютона.
в вираз (5.9), отримаємо першу інтерполяційну формулу Ньютона.
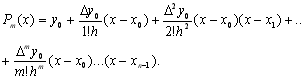 (5.11)
(5.11)
На практиці часто використовують формулу Ньютона в іншому вигляді. Для цього введемо заміну ![]() де
де ![]() крок інтерполяції, а q - число кроків. Тоді перша інтерполяційна формула Ньютона прийме наступний вигляд:
крок інтерполяції, а q - число кроків. Тоді перша інтерполяційна формула Ньютона прийме наступний вигляд:
![]() (5.12)
(5.12)
Формулу (5.12) зручно використати для інтерполювання на початку відрізку інтерполяції ![]() , де q мале за абсолютною величиною.
, де q мале за абсолютною величиною.
Якщо за число вузлів інтерполяції прийняти ![]() , то отримаємо формулу лінійного інтерполювання
, то отримаємо формулу лінійного інтерполювання
![]()
При ![]() отримаємо формулу параболічного, або квадратичного інтерполювання
отримаємо формулу параболічного, або квадратичного інтерполювання ![]()
На практиці часто буває необхідно зменшити крок інтерполяції якої-небудь таблиці з рівновіддаленими аргументами. В таблиці можна вважати, що кількість вузлів інтерполяції необмежена. Тоді вибирають ![]() так, щоб кінцева різниця
так, щоб кінцева різниця ![]() була постійна з заданим ступенем точності. За початкове значення
була постійна з заданим ступенем точності. За початкове значення ![]() можна вибирати будь-яке значення аргументу.
можна вибирати будь-яке значення аргументу.
Схема алгоритму інтерполяції табличної функції багаточленом Ньютона представлена на рисунку 5.4.
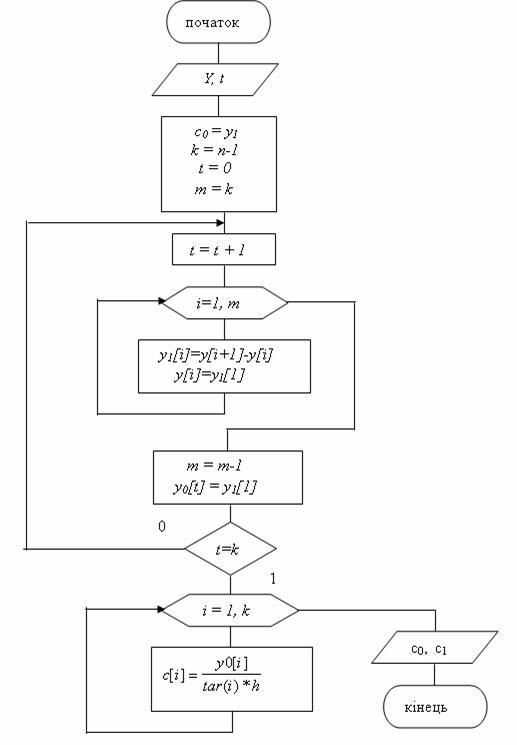
Рисунок 5.4 – Схема алгоритму інтерполяції табличної функції багаточленом Ньютона
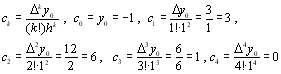
Приклад. Припустимо, що результати експерименту представлені в таблиці 5.2 (перших три стовпця)
З таблиці видно, що
![]()
![]() ,
,![]()
Таблиця 5.2 – Результати експерименту
N |
x |
y |
|
|
|
|
|
0 |
0 |
-1 |
3 |
12 |
6 |
0 |
0 |
1 |
1 |
2 |
15 |
18 |
6 |
0 |
|
2 |
2 |
17 |
33 |
24 |
6 |
||
3 |
3 |
50 |
57 |
30 |
|||
4 |
4 |
107 |
87 |
||||
5 |
5 |
194 |
Побудуємо багаточлен Ньютона:
Q=-1+3x+6(x(x-1))+1(x(x-1)(x-2))+0=-1+3x+6x2-6x+x3-2x2-x2+2x=x3+3x2-x-1
Висновки:
1. За допомогою аналітичної залежності ![]() можливо отримати значення функції для
можливо отримати значення функції для ![]() , які знаходяться між точками дослідження. отримуємо це називається задачею інтерполяції.
, які знаходяться між точками дослідження. отримуємо це називається задачею інтерполяції.
2. За допомогою аналітичної залежності ![]() можна отримати значення функції за межами інтервалу дослідження. Наприклад, при
можна отримати значення функції за межами інтервалу дослідження. Наприклад, при ![]()
![]()
![]() . Дана задача називається екстраполяцією або прогнозуванням.
. Дана задача називається екстраполяцією або прогнозуванням.
1. Щуп Т. Решение инженерных задач на ЕВМ. – М.: Мир, 1982. – 235с.
2. Демидович Б. П., Марон И. А. Основы вычислительной математики. – М.: Наука, 1970. – 664 с.
3. Демидович Б. П., Марон И. А., Шувалова Е. З. Численные методы анализа. – М.: Мир, 1967
4. Мак – Кракен Д., Дрон У. Численные методы и програмирование на фортране. – М.: Мир, 1977. – 584 с.
5. Бахвалов Н. С. Численные методы . Т. И. Анализ, алгебра, обычные диференциальные уравнения. – М.: Наука, 1975. – 631 с.
6. Краскевич В. Є., Зеленський К. Х., Гречко В. И. Численные методы в инженерных исследованиях. – К.: Высшая шк.., 1986. – 263 с.
7. Рисс Ф., Секефальви – Надь Б. Лекции по функциональному анализу – М.: Мир, 1979.
8. Плис А.И., Сливина Н.А. Mathcad. Математический практикум для инженеров и экономистов: – М.: Финансы и статистика, 2003. – 656с.
9. Тихомиров В. М. Некоторые вопросы теории приближений. – М.: МГУ, 1976.
10. Ахиезер Н. И. Лекции по теории апроксимации. – М.: Наука, 1965.
11. В.И. Бердышев, Ю.Н. Субботин. Численные методы приближения функций. – Средне-Уральское книжное книжное издательство, 1979.
12. Суетин П. К. Классические ортогональные многочлены. – М.: Наука, 1976. – 327 с.
13. Альберг Дж., Нильсон Е., Уолт Дж. Теория сплайнов и ее дополнение. – М.: Мир, 1972.
14. Стечкин С. Б., Суботин Ю. Н. Сплайны в вычислительной математике. – М.: Наука, 1976.
15. Трауб Дж. Итерационные методы решения уравнений. – М.: Мир, 1985. – 263 с.
1. Загальна постановка задачі інтерполяції.
2. Що називається інтерполяційним багаточленом, вузлами інтерполяції?
3. Для функції y = f(x), яка визначена на інтервалі (0, ![]() ) і задана в вигляді таблиці значень yk = f(xk):
) і задана в вигляді таблиці значень yk = f(xk):
1. |
2. |
3. |
4. |
5. |
6. k |
7. |
8. |
9. |
10. |
11. k |
12. |
13. |
14. 4 |
15. 6 |
скласти тригонометричний інтерполяційний багаточлен.
Відповідь: ![]()
4. Для функції y = f(x), яка визначена на інтервалі (0, 1) і задана у вигляді таблиці значень yk = f(xk):
16. |
17. |
18. |
19. |
20. |
21. |
22. |
23. k |
24. |
25. |
26. |
27. |
28. |
29. |
30. k |
31. |
32. |
33. |
34. |
35. |
36. |
скласти тригонометричний багаточлен не нижче другого порядку.
Відповідь: ![]()
5. Побудувати інтерполяційний багаточлен Лагранжа для функції, яка задана таблицею
37. |
38. 2 |
39. 1 |
40 |
41. |
42. |
43. 12 |
44. 8 |
45. |
46. |
Відповідь: ![]()
6. Побудувати багаточлен Ньютона для функції, заданої таблицею:
47. |
48. 3 |
49 |
50. |
51. |
52. |
53. |
54. 1 5 |
55. 7 |
56. |
57. 5 |
58. 7 |
7. Зробити постановку задачі на інтерполяцію функції, яка задана таблицею з не рівновіддаленими вузлами інтерполяції.
8. Зробити постановку задачі на інтерполяцію функції, яка задана таблицею з рівновіддаленими вузлами інтерполяції.~