|
ТЕОРЕТИЧНА ТА ПРИКЛАДНА МЕХАНІКА
|
|
|
ТЕОРЕТИЧНА ТА ПРИКЛАДНА МЕХАНІКА
|
7.3 Приклад виконання завдання
Кривошипно-шатунний механізм (рис. 7.4) складається з кривошипа ОА=40 см, шатуна АВ і повзуна В. Точка С належить ланці АВ і АС=20 см.
У даний момент часу, в даному положенні механізму кутова швидкість кривошипа ωОА=5 рад/с, кутове прискорення εОА=10 рад/с2.
Визначити для заданого положення механізму швидкості й прискорення точок А, В, С ланки АВ, а також її кутову швидкість ωАВ і кутове прискорення εАВ.
Розв’язання
1. Ланка ОА виконує обертальний рух навколо нерухомої точки О. Тоді
 .
.
Вектор  і спрямований у бік обертання ОА, у бік обертання ω.
і спрямований у бік обертання ОА, у бік обертання ω.
Повзун В виконує поступальний рух, тому напрямок швидкості точки В, яка також належить ланці АВ, відомий і спрямований уздовж траєкторії руху точки В.
Шатун АВ рухається плоскопаралельно з миттєвим центром швидкості в точці Р. Точка Р є точкою перетину перпендикулярів до напрямку швидкостей у точках А і В.
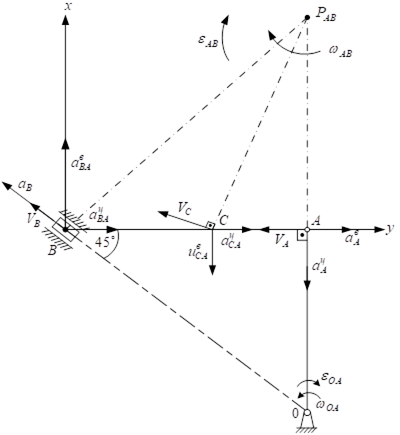
Рисунок 7.4
Кутова швидкість ланки АВ
 ,
,
де АР=АВ=ОА, тому що  /
/
Кутова швидкість ланки АВ спрямована відповідно до того, як вектор  обертається навколо МЦШ.
обертається навколо МЦШ.
Швидкості точок В і С ланки АВ:
 ,
,
 .
.
Відповідно  ,
,  і спрямовані у бік обертання
і спрямовані у бік обертання  .
.
2. Визнаємо прискорення точок А, В, С ланки АВ.
Прискорення точки А по належності її ланці ОА, що виконує обертальний рух навколо нерухомої осі, складається з геометричної суми обертального і доцентрового прискорень:
 ,
,
де  ‑ доцентрове прискорення точки А, спрямоване уздовж АО від А до О,
‑ доцентрове прискорення точки А, спрямоване уздовж АО від А до О,
 ‑ обертальне прискорення точки А, спрямоване відповідно до напрямку кутового прискорення
‑ обертальне прискорення точки А, спрямоване відповідно до напрямку кутового прискорення  і вектор
і вектор  .
.

 ;
;  .
.
Припустимо, що повзун В рухається прискорено. Тоді напрямок прискорення  співпадає з напрямком швидкості
співпадає з напрямком швидкості  . Визначаємо полюсом точку А.
. Визначаємо полюсом точку А.
Прискорення точки В визначається за формулою
 ,
,
де  ‑ доцентрове прискорення точки В відносно точки А, спрямоване від точки В до точки А, уздовж АВ
‑ доцентрове прискорення точки В відносно точки А, спрямоване від точки В до точки А, уздовж АВ
 ‑ обертальне прискорення точки В відносно точки А, спрямоване перпендикулярно до АВ і
‑ обертальне прискорення точки В відносно точки А, спрямоване перпендикулярно до АВ і  , відоме за напрямком. При цьому припускаємо, що кутове прискорення ланки АВ
, відоме за напрямком. При цьому припускаємо, що кутове прискорення ланки АВ  співпадає за напрямком обертання з кутовою швидкістю
співпадає за напрямком обертання з кутовою швидкістю  .
.
Обираємо систему координат xВy (рис. 7.4) і проектуємо геометричне рівняння прискорення точки В, на осі координат:
У:  ,
,
Х: .
.
У цій системі двох алгебраїчних рівнянь є два невідомі прискорення  точки В і прискорення
точки В і прискорення  .
.
Обчислюємо їх:
 ,
,
 .
.
Знак мінус у знайдених відповідях означає, що насправді вектори прискорень і  спрямовані у бік, протилежний зазначеному на рисунку, тобто прискорення точки В протилежне напрямку швидкості .
спрямовані у бік, протилежний зазначеному на рисунку, тобто прискорення точки В протилежне напрямку швидкості .
Кутове прискорення ланки АВ:
 .
.
Знак мінус означає, що кутове прискорення ланки АВ протилежне кутовій швидкості  за напрямком обертання.
за напрямком обертання.
Прискорення точки С ланки АВ визначаємо за цією ж методикою:
 .
.
 і напрямлено вздовж АС від С до А.
і напрямлено вздовж АС від С до А.
 і спрямоване у бік дійсного спрямування
і спрямоване у бік дійсного спрямування  таким чином, щоб .
таким чином, щоб .
Геометричне рівняння з визначення  проектуємо на осі у і х:
проектуємо на осі у і х:
У:  ,
,
Х:  ,
,
 ‑ діагональ прямокутника, побудованого на складових
‑ діагональ прямокутника, побудованого на складових  .
.
 .
.
Відповідь:VA=200 cм/с, aA=1077 см/с2, ωAB=5 рад/с, VB=282,8 cм/с, aB=1980 см/с2, Vc=223,6 cм/с, ac=1500 см/с2, εAB=10 рад/с2.
 Назад
Назад Зміст
Зміст Вперед
Вперед