3.9 Критерій Неймана-Пірсона
На практиці часто буває, що можуть бути невідомі не тільки апріорні ймовірності появи об’єктів відповідних класів, але й платіжні матриці. У таких системах для побудови алгоритму класифікації доцільно скористатися критерієм Неймана-Пірсона, суть якого полягає у такому.
Виходячи з того, що рішення приймаються за результатами експерименту над об’єктами, визначається допустиме (задане) значення умовної ймовірності помилки першого роду, а після цього визначається така границя між класами прийняття рішень, дотримуючись якої вдається досягти мінімуму умовної ймовірності помилки другого роду.
Нехай з деяких міркувань прийнято рішення, що допустима умовна ймовірність помилки першого виду не повинна перевищувати деякої постійної величини Q1 ≤ A. Треба визначити х0 для задачі minQ2 = min f2(x)dx за обмежень типу Q1 = ∫f2(x)dx ≤ А. Oчeвидно, що рішення xо задовольняє рівнянню ∫f1(x) dx = A, оскільки для значення хо` > хо умовна ймовірність помилок другого роду Q2 зростає. Обрати ж значення xо’ << хо не можна за умовою задачі.
На завершення розглянемо геометричну інтерпретацію вищевказаних критеріїв. Для цього в координатах Di = 1 – Qi і Qi побудуємо характеристику (рис. 3.4), відзначаючи що для Q1 = 0 Q2 = 1 і D2 = 0, і навпаки, для Q1 = l Q2 = 0 і D2 = l. Оскільки Q1 = ∫ f1(x)dx, a D2 = ∫ f2(x)dx, то продиференціювавши D2 по Q1, отримаємо, що:
 , (3.49)
, (3.49)
Однак, диференціал dD2/dQ1 ;є тангенсом кута нахилу дотичної до робочої характеристики для λ = λо. Тому, для визначення Q1 і D1 на основі застосування критерію Байеса на робочій характеристиці знайдемо точку, дотична у якій має нахил, що дорівнює λо = [Р(Ω1)с1/Р(Ω2)с2], тобто tg α = λo. Тепер ордината цієї точки визначає умовну ймовірність правильного рішення, а абсциса – означає умовну ймовірність помилки першого роду.
Для визначення Q1 і D2 за мінімаксним критерієм необхідно враховувати, що похідна від середнього ризику за апріорною ймовірністю P(Ω1) у точці його максимуму дорівнює нулю. Оскільки:
R = c11P(Ω1) (l – Q1) + с12P(Ω1)Q1 + с22[1 – P(Ω1)]D2 + c21[l – P(Ω1)](1 – D2),(3.50)
тo
∂R/∂P(Ω1) = c11(1 – Ql) + c12Q1 – c22D2 – c21(1D2) = 0.(3.51)
В координатах Q1 і Q2 це рівняння прямої і якщо с11 = с22, то:
D2 = Q1[c11 - c12)/(c21 - c22)]+1,(3.52)
з кутовім коефіцієнтом γ = tgβ = [(c11 – с12)/(c21 – с22)] + 1.
Проведемо на графіку (рис. 3.4) цю пряму АВ.
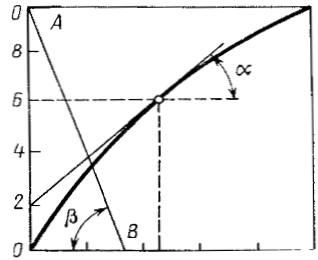
Координати точки перетину цієї прямої з робочою характеристикою визначають умовні ймовірності Q1 і D2 = 1 – Q2 в умовах застосування мінімаксного критерію. Тангенс кута нахилу дотичної у цій точці дорівнює λо.